Քայլային շարժիչը էլեկտրական շարժիչ է, որը էլեկտրական էներգիան փոխակերպում է մեխանիկական էներգիայի, և դրա ելքային պտտող մոմենտը և արագությունը կարող են ճշգրտորեն կարգավորվել էլեկտրամատակարարումը կառավարելով։
Ես, քայլային շարժիչի առավելությունները
Բարձր ճշգրտություն
Քայլային շարժիչի պտտման անկյունը համեմատական է մուտքային իմպուլսների քանակին, ուստի հնարավոր է ճշգրիտ կառավարել իմպուլսների քանակը և հաճախականությունը՝ շարժիչի դիրքի և արագության ճշգրիտ կառավարման համար: Այս բնութագիրը քայլային շարժիչներին դարձնում է գերազանց այնպիսի կիրառություններում, որոնք պահանջում են բարձր ճշգրտությամբ դիրքավորում, ինչպիսիք են CNC հաստոցները, տպագրական մեքենաները և տեքստիլ մեքենաները:
Քայլային շարժիչները սովորաբար ունեն 3%-ից 5% ճշգրտություն մեկ քայլի համար և չեն կուտակում սխալը նախորդ քայլից հաջորդը, այսինքն՝ չեն առաջացնում կուտակային սխալներ: Սա նշանակում է, որ քայլային շարժիչները կարող են պահպանել բարձր դիրքային ճշգրտություն և շարժման կրկնելիություն երկար ժամանակահատվածներում կամ անընդհատ շարժման ընթացքում:
Բարձր կառավարելի

Քայլային շարժիչի աշխատանքը իրականացվում է իմպուլսային հոսանքը կառավարելու միջոցով, ուստի շարժիչի կառավարումը կարող է իրականացվել ծրագրային ապահովման միջոցով: Այս ծրագրավորելիությունը թույլ է տալիս քայլային շարժիչներին բավարարել լայնածավալ կիրառությունների կարիքները, ինչպիսիք են ավտոմատացված արտադրական գծերը, ռոբոտաշինությունը և այլ ոլորտներ:
Քանի որ քայլային շարժիչի արձագանքը որոշվում է միայն մուտքային իմպուլսով, կարելի է օգտագործել բաց ցիկլի կառավարում, ինչը շարժիչի կառուցվածքը դարձնում է ավելի պարզ և ավելի էժան կառավարման համար։ Բաց ցիկլի կառավարումը նաև նվազեցնում է համակարգի բարդությունը և սպասարկման ծախսերը։
Բարձր պտտող մոմենտ ցածր արագություններում
Քայլային շարժիչները ցածր արագությունների դեպքում ունեն բարձր պտտող մոմենտ, ինչը դրանք գերազանց է դարձնում ցածր արագություն և բարձր պտտող մոմենտ պահանջող կիրառություններում, ինչպիսիք են ավտոմատ պիտակավորման մեքենաները և փաթեթավորման մեքենաները:
Քայլային շարժիչները կանգ առնելիս ունենում են առավելագույն պտտող մոմենտ, ինչը նրանց առավելություն է տալիս այն դեպքերում, երբ պահանջվում է դիրքային կայունություն կամ արտաքին բեռների նկատմամբ դիմադրություն։
Բարձր հուսալիություն

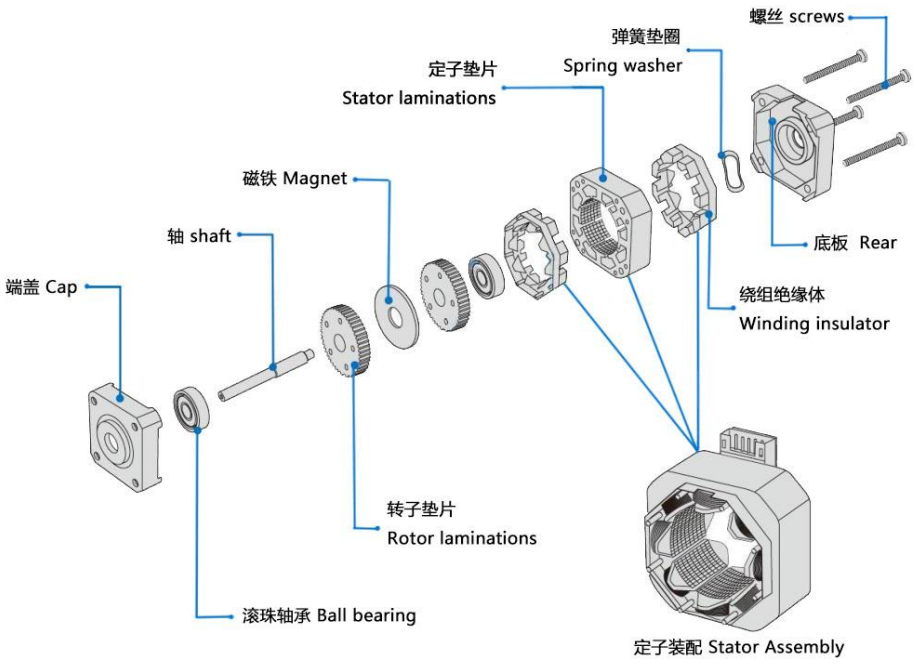
Քայլային շարժիչները խոզանակներ չունեն, այդպիսով նվազեցնելով խոզանակների մաշվածության պատճառով առաջացող անսարքությունները և աղմուկը: Սա քայլային շարժիչները դարձնում է բարձր հուսալիություն, քանի որ շարժիչի կյանքի տևողությունը մեծապես կախված է կրողների կյանքի տևողությունից:
Քայլային շարժիչները ունեն պարզ կառուցվածք, որը բաղկացած է երեք մասից՝ շարժիչը, շարժիչը և կառավարիչը, ինչը տեղադրումն ու սպասարկումը դարձնում է համեմատաբար հեշտ։
Լայն արագության միջակայք

Քայլային շարժիչները ունեն համեմատաբար մեծ արագության միջակայք, և շարժիչի արագությունը կարող է փոխվել իմպուլսային հաճախականությունը կարգավորելով։ Սա թույլ է տալիս քայլային շարժիչին հարմարվել տարբեր աշխատանքային արագություններին և բեռի պահանջներին։
Լավ մեկնարկ-կանգ և հակադարձ արձագանք
Քայլային շարժիչները արագ արձագանքում են կառավարման ազդանշաններին մեկնարկի և կանգառի ժամանակ և պահպանում են բարձր ճշգրտություն և կայունություն հետընթացի ժամանակ։ Այս առանձնահատկությունը քայլային շարժիչին առավելություն է տալիս հաճախակի մեկնարկ-կանգառի և հետընթացի անհրաժեշտության դեպքում։
II, քայլային շարժիչների թերությունները
Հեշտ է կորցնել կամ անցնել աստիճանը
Եթե քայլային շարժիչները պատշաճ կերպով չեն կառավարվում, դրանք կարող են շեղվել կամ գերազանցել քայլերը։ Շեղումը նշանակում է, որ շարժիչը չի պտտվում նախապես որոշված քայլերի քանակին համապատասխան, մինչդեռ շեղումը նշանակում է, որ շարժիչը պտտվում է նախապես որոշված քայլերի քանակից ավելի։ Այս երկու երևույթներն էլ հանգեցնում են շարժիչի դիրքային ճշգրտության կորստի և ազդում են համակարգի աշխատանքի վրա։
Շեղումների և գերազանցումների առաջացումը կապված է այնպիսի գործոնների հետ, ինչպիսիք են շարժիչի բեռը, պտտման արագությունը և կառավարման ազդանշանի հաճախականությունն ու ամպլիտուդը: Հետևաբար, քայլային շարժիչներ օգտագործելիս այս գործոնները պետք է ուշադիր հաշվի առնվեն և համապատասխան միջոցներ ձեռնարկվեն՝ շեղումների և գերազանցումների առաջացումը կանխելու համար:
Բարձր պտտման արագությունների հասնելու դժվարություն
Քայլային շարժիչի պտտման արագությունը սահմանափակվում է դրա աշխատանքային սկզբունքով, և սովորաբար դժվար է հասնել բարձր պտտման արագության: Չնայած հնարավոր է մեծացնել շարժիչի արագությունը՝ մեծացնելով կառավարման ազդանշանի հաճախականությունը, չափազանց բարձր հաճախականությունը կհանգեցնի այնպիսի խնդիրների, ինչպիսիք են շարժիչի տաքացումը, աղմուկի աճը և նույնիսկ կարող է վնասել շարժիչը:
Հետևաբար, քայլային շարժիչներ օգտագործելիս անհրաժեշտ է ընտրել համապատասխան արագության միջակայք՝ համաձայն կիրառման պահանջների և խուսափել երկար ժամանակահատվածում բարձր արագությամբ աշխատելուց։
Զգայուն է բեռնման փոփոխությունների նկատմամբ
Քայլային շարժիչները պահանջում են հոսանքի իմպուլսների քանակի և հաճախականության իրական ժամանակի կառավարում աշխատանքի ընթացքում՝ դիրքի և արագության ճշգրիտ կառավարումն ապահովելու համար: Սակայն, մեծ բեռի փոփոխությունների դեպքում, կառավարման հոսանքի իմպուլսը կխաթարվի, ինչը կհանգեցնի անկայուն շարժման և նույնիսկ անվերահսկելի քայլքի:
Այս խնդիրը լուծելու համար կարող է օգտագործվել փակ ցիկլով կառավարման համակարգ՝ շարժիչի դիրքը և արագությունը վերահսկելու և կառավարման ազդանշանը իրական իրավիճակին համապատասխան կարգավորելու համար: Սակայն դա կբարձրացնի համակարգի բարդությունը և արժեքը:
Ցածր արդյունավետություն
Քանի որ քայլային շարժիչները կառավարվում են անընդհատ կանգառի և մեկնարկի միջև ընկած ժամանակահատվածում, դրանց արդյունավետությունը համեմատաբար ցածր է այլ տեսակի շարժիչների համեմատ (օրինակ՝ հաստատուն հոսանքի շարժիչներ, փոփոխական հոսանքի շարժիչներ և այլն): Սա նշանակում է, որ քայլային շարժիչները նույն ելքային հզորության համար սպառում են ավելի շատ էներգիա:
Քայլային շարժիչների արդյունավետությունը բարելավելու համար կարող են կիրառվել այնպիսի միջոցառումներ, ինչպիսիք են կառավարման ալգորիթմների օպտիմալացումը և շարժիչի կորուստների նվազեցումը: Այնուամենայնիվ, այս միջոցառումների իրականացումը պահանջում է որոշակի մակարդակի տեխնոլոգիա և ծախսային ներդրումներ:
III, քայլային շարժիչների կիրառման շրջանակը.
Քայլային շարժիչները լայնորեն կիրառվում են բազմաթիվ ոլորտներում՝ իրենց եզակի առավելությունների և որոշակի սահմանափակումների շնորհիվ: Ստորև ներկայացված է քայլային շարժիչների կիրառման շրջանակի մանրամասն քննարկումը.
Ռոբոտաշինություն և ավտոմատացման համակարգեր
Քայլային շարժիչները լայնորեն կիրառվում են արդյունաբերական ռոբոտներում, ավտոմատացված արտադրական գծերում և այլ ոլորտներում: Դրանք կարող են ճշգրիտ կառավարել ռոբոտների շարժման արագությունն ու ուղղությունը, ինչպես նաև ապահովել բարձր ճշգրտությամբ դիրքավորում և արագ արձագանք ավտոմատացված արտադրական գործընթացներում:
CNC մեքենաներ

Տպիչներ

Քայլային շարժիչները օգտագործվում են տպիչի գլխիկի շարժումը կառավարելու համար այնպիսի սարքերում, ինչպիսիք են թանաքային և լազերային տպիչները: Շարժիչի շարժումը ճշգրիտ կառավարելով՝ կարելի է իրականացնել բարձրորակ տեքստի և պատկերի տպագրություն: Այս առանձնահատկությունը քայլային շարժիչները լայնորեն օգտագործվում է տպագրական սարքավորումներում:
Բժշկական սարքեր

Քայլային շարժիչները օգտագործվում են բժշկական պատկերագրական սարքավորումներում (օրինակ՝ ռենտգենյան սարքեր, համակարգչային տոմոգրաֆիայի սկաներներ և այլն)՝ սկանավորման շրջանակի շարժումը կառավարելու համար: Շարժիչի շարժումը ճշգրիտ կառավարելով՝ կարելի է ապահովել հիվանդի արագ և ճշգրիտ պատկերագրություն: Այս առանձնահատկությունը քայլային շարժիչներին դարձնում է կարևոր դեր խաղալ բժշկական սարքավորումներում:
Ավիատիեզերական

Քայլային շարժիչները օգտագործվում են ավիատիեզերական սարքավորումների, ինչպիսիք են արբանյակային դիրքի կառավարման և հրթիռային շարժիչային համակարգերը, ակտուատորների շարժումը կառավարելու համար: Քայլային շարժիչները լավ աշխատանք են ցուցաբերում բարձր ճշգրտության և բարձր կայունության պահանջների դեպքում: Այս բնութագիրը քայլային շարժիչները դարձնում է ավիատիեզերական ոլորտի կարևոր մաս:
Զվարճանքի և խաղերի սարքավորումներ

Քայլային շարժիչները օգտագործվում են լազերային փորագրիչների, 3D տպիչների և խաղային կառավարիչների նման սարքերում ակտուատորների շարժումը կառավարելու համար: Այս սարքերում քայլային շարժիչների ճշգրիտ կառավարումը կարևոր է բարձրորակ արտադրանք և հիանալի օգտագործողի փորձառություն ապահովելու համար:
Կրթություն և հետազոտություն

Քայլային շարժիչները օգտագործվում են փորձարարական հարթակների շարժը կառավարելու համար այնպիսի իրավիճակներում, ինչպիսիք են լաբորատոր գործիքները և ուսուցողական սարքավորումները: Կրթության մեջ քայլային շարժիչների ցածր գինը և բարձր ճշգրտությունը դրանք դարձնում են իդեալական ուսուցողական գործիքներ: Քայլային շարժիչների ճշգրիտ կառավարման բնութագրերը օգտագործելով՝ դրանք կարող են օգնել ուսանողներին ավելի լավ հասկանալ ֆիզիկան և ճարտարագիտական սկզբունքները:
Ամփոփելով՝ քայլային շարժիչներն ունեն բարձր ճշգրտության, կառավարելիության, ցածր արագության և բարձր պտտող մոմենտի, ինչպես նաև բարձր հուսալիության առավելություններ, սակայն դրանք նաև ունեն թերություններ՝ հեշտությամբ շեղվելով կամ դուրս գալով քայլից, դժվար հասնելով բարձր պտտման արագությունների, զգայուն լինելով բեռի փոփոխությունների նկատմամբ և ցածր արդյունավետությամբ։ Քայլային շարժիչներ ընտրելիս անհրաժեշտ է հաշվի առնել դրանց առավելություններն ու թերությունները, ինչպես նաև կիրառման շրջանակը՝ համաձայն կիրառման պահանջների՝ համակարգի արդյունավետությունն ու կայունությունն ապահովելու համար։
Հրապարակման ժամանակը. Նոյեմբերի 14, 2024