Քանի որ հանրային առողջությունն ու անվտանգությունը մեր առօրյա կյանքում գերակա խնդիր են, ավտոմատ դռների կողպեքները գնալով ավելի տարածված են դառնում, և այս կողպեքները պետք է ունենան բարդ շարժման կառավարում: Մանրակրկիտ ճշգրտություն:քայլային շարժիչներայս կոմպակտ, բարդ դիզայնի համար իդեալական լուծում են։ Ավտոմատդռան կողպեքներարդեն որոշ ժամանակ է՝ սկսելով հյուրանոցների և գրասենյակների առևտրային տարածքներից: Սմարթֆոնների օգտատերերի թվի աճի և խելացի տան տեխնոլոգիայի տարածման հետ մեկտեղ, բնակելի ավտոմատ համակարգերըդռան կողպեքի կիրառություններնույնպես ժողովրդականություն են ձեռք բերել: Առևտրային և բնակելի օգտագործողների միջև կան տեխնիկական տարբերություններ, ինչպիսիք են մարտկոցների օգտագործումը էլեկտրոնային կապի համեմատ և RFID-ը Bluetooth տեխնոլոգիայի համեմատ:

Ավանդական փականը պահանջում է, որ բանալին մտցվի կողպեքի գլանը՝ այն ձեռքով պտտելու միջոցով կողպելու/բացելու համար։ Այս մեթոդի առավելությունն այն է, որ այն բավականին անվտանգ է։ Մարդիկ կարող են կորցնել կամ կորցնել բանալիները, և կողպեքները/բանալիները փոխելու գործընթացը պահանջում է գործիքների և փորձի օգտագործում։ Էլեկտրոնային կողպեքներն ավելի ճկուն են մուտքի վերահսկողության առումով և հաճախ կարող են հեշտությամբ փոփոխվել և թարմացվել ծրագրային ապահովման միջոցով։ Շատ էլեկտրոնային կողպեքներ առաջարկում են ինչպես ձեռքով, այնպես էլ էլեկտրոնային կողպեքի կառավարման տարբերակներ՝ ապահովելով ավելի հուսալի լուծում։
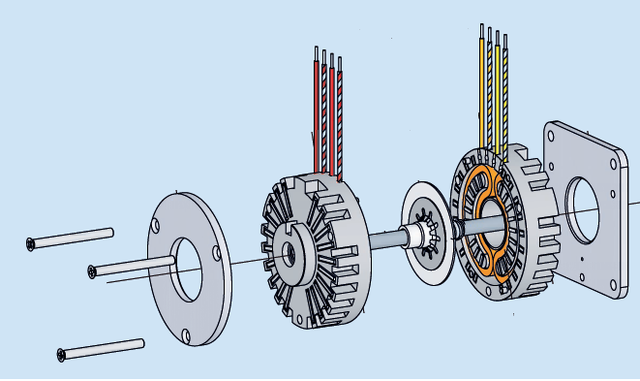
Կոմպակտ էլեկտրոնային կողպեքների համար նախատեսված փոքր տրամագծով քայլային շարժիչները իդեալական են չափերի սահմանափակումներով և ճշգրիտ դիրքավորմամբ լուծումների համար: Շարժիչների ինժեներիան և սեփական մագնիսացման տեխնոլոգիաները խթանել են ներկայումս առկա ամենափոքր տրամագծով քայլային շարժիչների մշակումը (3.4 մմ արտաքին տրամագիծ): Սահմանափակ տարածքի համար դիզայնը և նյութերը օպտիմալացնելու համար օգտագործվում են առաջադեմ մագնիսական և կառուցվածքային վերլուծության մեթոդներ: Մանրանկարչական քայլային շարժիչների համար ամենակարևոր որոշումներից մեկը շարժիչի քայլի երկարությունն է, որը կախված է կոնկրետ լուծաչափից: Ամենատարածված քայլի երկարությունները 7.5 աստիճան և 3.6 աստիճան են, որոնք համապատասխանում են համապատասխանաբար 48 և 100 քայլի մեկ պտույտի համար, որտեղ քայլային շարժիչներն ունեն 18 աստիճանի քայլի անկյուն: Լիարժեք քայլով (2-2 փուլային գրգռում) շարժիչը պտտվում է 20 քայլ մեկ պտույտի համար, և պտուտակի ընդհանուր քայլը 0.4 մմ է, ուստի կարելի է հասնել 0.02 մմ դիրքի կառավարման ճշգրտության:

Քայլային շարժիչները կարող են ունենալ ատամնանիվների ռեդուկտոր, որն ապահովում է ավելի փոքր քայլի անկյուն, և ռեդուկտոր, որը մեծացնում է առկա պտտող մոմենտը: Գծային շարժման համար քայլային շարժիչները միացված են պտուտակին ընկույզի միջոցով (այս շարժիչները կոչվում են նաև գծային ակտուատորներ): Եթե էլեկտրոնային կողպեքն օգտագործում է ատամնանիվների ռեդուկտոր, պտուտակը կարող է ճշգրտորեն շարժվել նույնիսկ մեծ թեքության դեպքում:
Քայլային շարժիչի սնուցման աղբյուրի մուտքային մասը կարող է ունենալ տարբեր ձևեր, ինչպիսիք են FPC միակցիչները, միակցիչի տերմինալները կարող են ուղղակիորեն եռակցվել տպատախտակին, ելքային մասի հրող ձողը կարող է լինել պլաստիկե կամ մետաղական սահիկ, ինչպես նաև որոշակի շարքի հատուկ սահիկներ՝ կախված կողպեքի շարժման պահանջներից: Փոքր քայլային շարժիչի և բարակ պտուտակների պատճառով մշակված թելի երկարությունը սահմանափակ է, և կողպեքի առավելագույն շարժումը, որպես կանոն, 50 մմ-ից պակաս է: Սովորաբար քայլային շարժիչն ունի մոտ 150-ից 300 գ հրող ուժ: Հրող ուժը տատանվում է՝ կախված շարժիչի լարումից, շարժիչի դիմադրությունից և այլն:
Եզրակացություն
Քանի որ սպառողները հետաքրքրված են ցածր շահույթ և աննկատելի արտադրանքով, մանրանկարչական քայլային շարժիչները կարող են հարմարվել այս փոքրացող չափսին: Բացի կոմպակտ ձևի գործակիցից, քայլային շարժիչները ավելի հեշտ են կառավարել, հատկապես ճշգրիտ դիրքավորման և ցածր արագության պտտող մոմենտի պահանջների համար, ինչպիսին է ավտոմատ կողպումը: Նույն ֆունկցիոնալությանը հասնելու համար այլ շարժիչային տեխնոլոգիաները պահանջում են Հոլլի էֆեկտի սենսորների կամ բարդ դիրքի հետադարձ կապի կառավարման մեխանիզմների ավելացում: Քայլային շարժիչները կարող են գործարկվել պարզ միկրոկառավարիչներով, ինչը կարող է նախագծող ինժեներներին ազատել չափազանց բարդ լուծումների մտահոգություններից:
Հրապարակման ժամանակը. Նոյեմբերի 25, 2022