Փակ ցիկլքայլային շարժիչներփոխել են կատարողականի և արժեքի հարաբերակցությունը շարժման կառավարման բազմաթիվ կիրառություններում: VIC փակ ցիկլով պրոգրեսիվ շարժիչների հաջողությունը նաև հնարավորություն է տվել թանկարժեք սերվոշարժիչները փոխարինել ցածրարժեքով:քայլային շարժիչներԲարձրակարգ արդյունաբերական ավտոմատացման կիրառությունների աճող թվաքանակում տեխնոլոգիական առաջընթացը փոխում է քայլային շարժիչների և սերվոշարժիչների միջև կատարողականի և արժեքի հարաբերակցությունը։
Քայլային շարժիչներ ընդդեմ սերվոշարժիչների
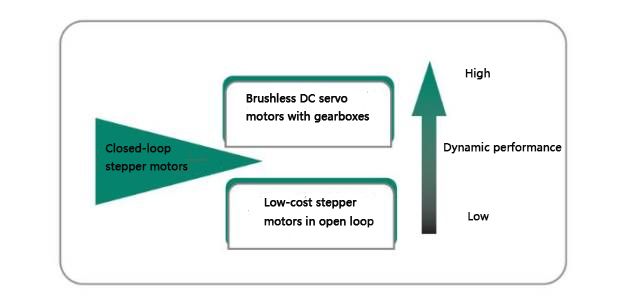
Համաձայն ընդունված կարծիքի, սերվոկառավարման համակարգերն ավելի լավ են աշխատում այն դեպքերում, երբ պահանջվում է 800 պտույտ/րոպեից ավելի արագություն և բարձր դինամիկ արձագանք: Քայլային շարժիչներն ավելի հարմար են ցածր արագություններով, ցածրից մինչև միջին արագացմամբ և բարձր պահող մոմենտով կիրառությունների համար:
Այսպիսով, ո՞րն է քայլային շարժիչների և սերվոշարժիչների վերաբերյալ այս ավանդական իմաստության հիմքը։ Եկեք այն ավելի մանրամասն վերլուծենք ստորև։
1. Պարզություն և արժեք
Քայլային շարժիչները ոչ միայն ավելի էժան են, քան սերվոշարժիչները, այլև ավելի հեշտ են շահագործել և պահպանել: Քայլային շարժիչները կայուն են անշարժ վիճակում և պահպանում են իրենց դիրքը (նույնիսկ դինամիկ բեռների դեպքում): Այնուամենայնիվ, եթե որոշակի կիրառությունների համար պահանջվում է ավելի բարձր արտադրողականություն, ապա պետք է օգտագործվեն ավելի թանկ և բարդ սերվոշարժիչներ:
2. Կառուցվածք
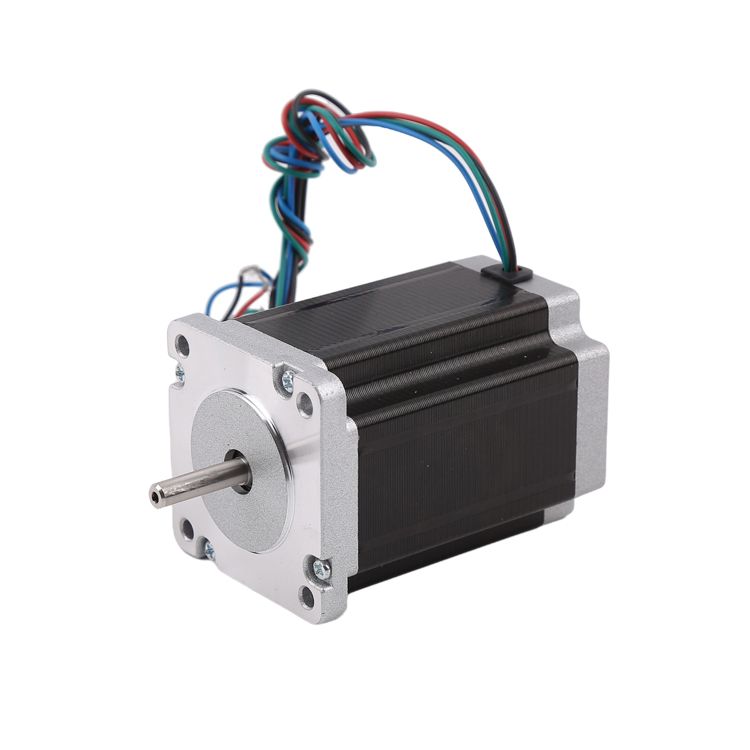
Քայլային շարժիչներպտտվում են աստիճանաբար՝ օգտագործելով մագնիսական կծիկներ՝ մագնիսը աստիճանաբար մեկ դիրքից մյուսը քաշելու համար։ Շարժիչը ցանկացած ուղղությամբ 100 դիրքով տեղաշարժելու համար սխեման պահանջում է շարժիչի վրա կատարել 100 քայլային գործողություն։ Քայլային շարժիչները օգտագործում են իմպուլսներ՝ աստիճանական շարժումներ կատարելու համար, ինչը թույլ է տալիս ճշգրիտ դիրքավորում առանց որևէ հետադարձ կապի սենսորների օգտագործման։
Սերվոշարժիչի շարժման մեթոդը տարբեր է։ Այն դիրքի սենսորը՝ այսինքն՝ կոդավորիչ, միացնում է մագնիսական ռոտորին և անընդհատ հայտնաբերում է շարժիչի ճշգրիտ դիրքը։ Սերվոշարժիչը վերահսկում է շարժիչի իրական դիրքի և հրամանված դիրքի միջև եղած տարբերությունը և համապատասխանաբար կարգավորում է հոսանքը։ Այս փակ ցիկլային համակարգը շարժիչը պահում է ճիշտ շարժման վիճակում։

3. Արագություն և պտտող մոմենտ
Քայլային և սերվոշարժիչների միջև աշխատանքի տարբերությունը բխում է դրանց շարժիչի տարբեր նախագծման լուծումներից։Քայլային շարժիչներունեն շատ ավելի մեծ թվով բևեռներ, քան սերվոշարժիչները, ուստի քայլային շարժիչի լրիվ պտույտը պահանջում է շատ ավելի շատ փաթույթների հոսանքի փոխանակումներ, ինչը հանգեցնում է պտտող մոմենտի արագ անկման արագության աճի դեպքում: Բացի այդ, եթե հասնում են առավելագույն պտտող մոմենտի, քայլային շարժիչը կարող է կորցնել իր արագության համաժամեցման գործառույթը: Այս պատճառներով սերվոշարժիչները նախընտրելի լուծում են բարձր արագության կիրառությունների մեծ մասում: Ի տարբերություն դրա, քայլային շարժիչի ավելի մեծ թվով բևեռները առավելություն ունեն ցածր արագությունների դեպքում, երբ քայլային շարժիչն ունի պտտող մոմենտի առավելություն նույն չափի սերվոշարժիչի նկատմամբ:
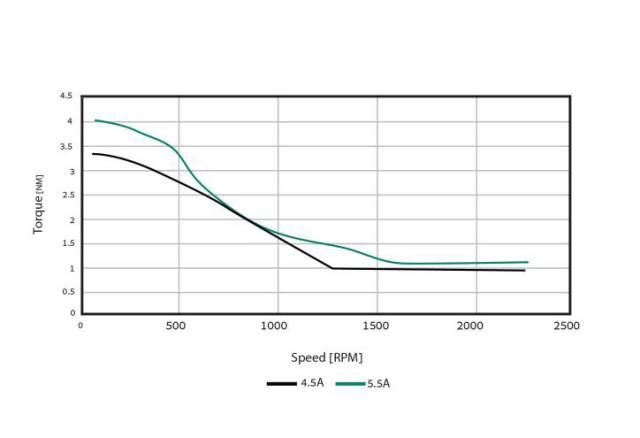
Արագության մեծացմանը զուգընթաց, քայլային շարժիչի պտտող մոմենտը նվազում է
4. Դիրքորոշում
Այն դեպքերում, երբ մեքենայի ճշգրիտ դիրքը պետք է միշտ հայտնի լինի, քայլային շարժիչների և սերվոշարժիչների միջև կան կարևոր տարբերություններ: Քայլային շարժիչներով կառավարվող բաց ցիկլով շարժման կիրառություններում կառավարման համակարգը ենթադրում է, որ շարժիչը միշտ գտնվում է ճիշտ շարժման վիճակում: Այնուամենայնիվ, խնդրի առաջացումից հետո, օրինակ՝ խրված բաղադրիչի պատճառով շարժիչի կանգառից հետո, կառավարիչը չի կարողանում իմանալ մեքենայի իրական դիրքը, ինչը կարող է հանգեցնել դիրքի կորստի: Սերվոշարժիչի փակ ցիկլով համակարգն ինքնին ունի առավելություն. եթե այն խցանվի որևէ առարկայի կողմից, այն անմիջապես կհայտնաբերի այն: Մեքենան կդադարի աշխատել և երբեք դիրքից դուրս չի մնա:
5. Ջերմության և էներգիայի սպառում
Բաց օղակաձև քայլային շարժիչները օգտագործում են ֆիքսված հոսանք և արձակում են մեծ քանակությամբ ջերմություն: Փակ օղակաձև կառավարումը ապահովում է միայն արագության օղակի համար անհրաժեշտ հոսանքը և, հետևաբար, խուսափում է շարժիչի տաքացման խնդրից:
Համեմատության ամփոփում
Սերվոկառավարման համակարգերը լավագույնս համապատասխանում են դինամիկ բեռի փոփոխություններ ներառող բարձր արագության կիրառություններին, ինչպիսիք են ռոբոտացված ձեռքերը: Մյուս կողմից, քայլային կառավարման համակարգերն ավելի հարմար են ցածրից մինչև միջին արագացում և բարձր պահող մոմենտ պահանջող կիրառությունների համար, ինչպիսիք են 3D տպիչները, փոխակրիչները, ենթաառանցքները և այլն: Քանի որ քայլային շարժիչներն ավելի էժան են, դրանք կարող են նվազեցնել ավտոմատացման համակարգերի արժեքը օգտագործման ժամանակ: Շարժման կառավարման համակարգերը, որոնք պետք է օգտվեն սերվոշարժիչների բնութագրերից, պետք է ապացուցեն, որ այս ավելի բարձր արժեք ունեցող շարժիչները ոսկու արժեք ունեն:
Փակ ցիկլով կառավարմամբ քայլային շարժիչներ
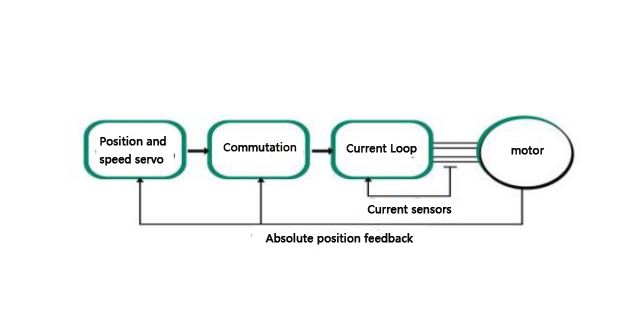
Ինտեգրված էլեկտրոնային կառավարման համակարգով քայլային շարժիչը համարժեք է երկֆազ անխոզանակ մշտական շարժիչին և կարող է կատարել դիրքի օղակի կառավարում, արագության օղակի կառավարում, DQ կառավարում և այլ ալգորիթմներ: Փակ օղակի կոմուտացիայի համար օգտագործվում է միակողմանի բացարձակ կոդավորիչ, այդպիսով ապահովելով օպտիմալ պտտող մոմենտ ցանկացած արագության դեպքում:
Ցածր էներգիայի սպառում և զովության պահպանում
VIC քայլային շարժիչները բարձր էներգաարդյունավետ են: Բաց օղակաձև քայլային շարժիչներից տարբերվող, որոնք միշտ աշխատում են լրիվ հոսանքի հրամանատարությամբ և առաջացնում են ջերմության և աղմուկի խնդիրներ, հոսանքը փոխվում է շարժման իրական պայմաններին համապատասխան, օրինակ՝ արագացման և դանդաղեցման ժամանակ: Սերվոների նման, այս քայլային շարժիչների կողմից ցանկացած պահի սպառվող հոսանքը համեմատական է պահանջվող իրական պտտող մոմենտին: Քանի որ շարժիչը և ինտեգրված էլեկտրոնային կառավարման վահանակը աշխատում են ավելի զով, VIC քայլային շարժիչները կարող են հասնել ավելի բարձր գագաթնակետային պտտող մոմենտների, համեմատելի սերվո շարժիչների հետ:
Նույնիսկ բարձր արագությունների դեպքում, VIC քայլային շարժիչները պահանջում են ավելի քիչ հոսանք
Փակ ցիկլի տեխնոլոգիայի առաջընթացի շնորհիվ քայլային շարժիչները կարող են ներթափանցել բարձր արդյունավետությամբ, բարձր արագությամբ կիրառություններ, որոնք նախկինում պատկանում էին բացառապես սերվոշարժիչներին։
Փակ ցիկլային տեխնոլոգիայով քայլային շարժիչներ
Ի՞նչ կլիներ, եթե փակ ցիկլով սերվո տեխնոլոգիայի առավելությունները կարողանային կիրառվել քայլային շարժիչների վրա։
Կարո՞ղ ենք արդյոք հասնել սերվոշարժիչների հետ համեմատելի աշխատանքի՝ միաժամանակ գիտակցելով քայլային շարժիչների ծախսային առավելությունները։
Փակ ցիկլով կառավարման տեխնոլոգիայի համադրմամբ՝ քայլային շարժիչը կդառնա համապարփակ արտադրանք՝ ցածր գնով և՛ սերվո, և՛ քայլային շարժիչների առավելություններով։ Քանի որ փակ ցիկլով քայլային շարժիչները զգալի բարելավումներ են ապահովում աշխատանքի և էներգաարդյունավետության մեջ, դրանք կարող են փոխարինել ավելի թանկ սերվո շարժիչներին բարձր չափանիշներով կիրառությունների աճող թվաքանակում։
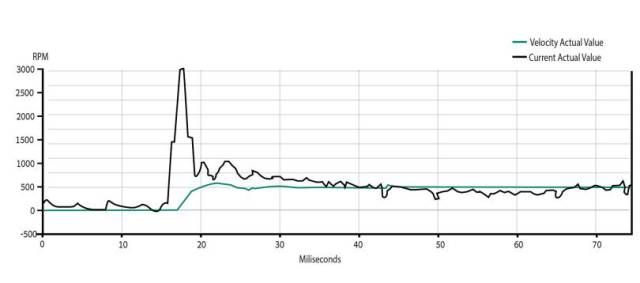
Ստորև բերված է VIC ինտեգրված քայլային շարժիչի օրինակ՝ ներկառուցված փակ ցիկլի կառավարման համակարգով, որը բացատրում է փակ ցիկլի տեխնոլոգիայով քայլային շարժիչների աշխատանքը, առավելություններն ու թերությունները։
Ճշգրիտ համապատասխանեցված կատարողականի պահանջներ
Խանգարումները հաղթահարելու և քայլերի կորուստը կանխելու համար բավարար պտտող մոմենտ ապահովելու համար, բաց ցիկլով քայլային շարժիչները սովորաբար պետք է ապահովեն, որ պտտող մոմենտը առնվազն 40%-ով ավելի բարձր լինի կիրառման համար պահանջվող արժեքից: Փակ ցիկլով քայլային շարժիչները այս խնդիրը չունեն: Երբ այս քայլային շարժիչները կանգ են առնում գերծանրաբեռնվածության պատճառով, դրանք կշարունակեն պահել բեռը՝ առանց պտտող մոմենտի կորստի: Դրանք կշարունակեն աշխատել գերծանրաբեռնվածության պայմանը վերացնելուց հետո: Առավելագույն պտտող մոմենտը կարող է երաշխավորվել ցանկացած տրված արագության դեպքում, և դիրքի սենսորը ապահովում է, որ քայլի կորուստ չկա: Հետևաբար, փակ ցիկլով քայլային շարժիչները կարող են ճշգրտորեն համապատասխանել համապատասխան կիրառման պտտող մոմենտի պահանջներին՝ առանց լրացուցիչ 40% մարժայի անհրաժեշտության:
Բաց օղակաձև քայլային շարժիչների դեպքում դժվար է բավարարել բարձր ակնթարթային պտտող մոմենտի պահանջները՝ կորած քայլերի ռիսկի պատճառով: Համեմատած ավանդական քայլային շարժիչների հետ, VIC փակ օղակաձև քայլային շարժիչները կարող են ապահովել շատ արագ արագացում, ցածր շահագործման աղմուկ և ցածր ռեզոնանս: Դրանք կարող են աշխատել շատ ավելի բարձր թողունակությամբ և հասնել գերազանց աշխատանքի:
Կաբինետ չկա
Toda-ն ինտեգրում է փոխանցման կառավարման վահանակը շարժիչի հետ՝ կրճատելով լարերի քանակը և պարզեցնելով լուծման իրականացումը: Toda-ի միջոցով դուք կարող եք կառուցել մեքենաներ առանց պահարանների:
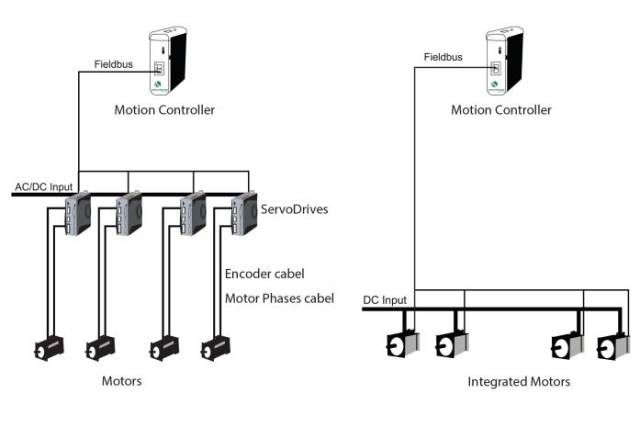
Էլեկտրոնիկայի ինտեգրումը քայլային շարժիչների հետ նվազեցնում է բարդությունը
Փակ ցիկլի տեխնոլոգիայի շնորհիվ, փակ ցիկլի քայլային շարժիչները օգտատերերին առաջարկում են գերազանց ճշգրտություն և արդյունավետություն՝ սերվոշարժիչի կատարողականությամբ և քայլային շարժիչի ցածր գնով: Ավելի էժան քայլային շարժիչները աստիճանաբար ներթափանցում են այնպիսի կիրառություններ, որոնք այլապես կգերակշռեին բարձրարժեք սերվոշարժիչները:
Հրապարակման ժամանակը. Ապրիլի 10-2023