Քայլային շարժիչներԱյսօր առկա ամենաբարդ շարժիչներից են, իրենց բարձր ճշգրտությամբ քայլային շարժիչներով, բարձր լուծաչափով և հարթ շարժումով, քայլային շարժիչները սովորաբար պահանջում են հարմարեցում՝ որոշակի պայմաններում օպտիմալ աշխատանքի հասնելու համար։ծրագրերՀաճախակի հարմարեցված դիզայնի հատկանիշներն են ստատորի փաթույթների սխեմաները, լիսեռի կոնֆիգուրացիաները, հատուկ պատյանները և մասնագիտացված կրողները, որոնք քայլային շարժիչների նախագծումն ու արտադրությունը դարձնում են չափազանց դժվար: Շարժիչները կարող են նախագծվել կիրառմանը համապատասխան, այլ ոչ թե ստիպել կիրառությունը համապատասխանել շարժիչին, և ճկուն շարժիչների դիզայնը կարող է զբաղեցնել նվազագույն տարածք: Միկրո քայլային շարժիչները դժվար են նախագծել և արտադրել և հաճախ չեն կարող մրցակցել ավելի մեծ շարժիչների հետ:Միկրո քայլային շարժիչներառաջարկում են եզակի դիզայնի մոտեցում, և հիբրիդային քայլային շարժիչի տեխնոլոգիայի ի հայտ գալու հետ մեկտեղ, միկրոշարժիչները սկսում են օգտագործվել բժշկական սարքերում և լաբորատոր ավտոմատացման մեջ, հատկապես բարձր ճշգրտություն պահանջող կիրառություններում, ինչպիսիք են միկրոպոմպերը, հեղուկի չափումը և կառավարումը, սեղմող փականները և օպտիկական սենսորային կառավարումը: Միկրո քայլային շարժիչները կարող են նույնիսկ ներառվել էլեկտրական ձեռքի գործիքներում, ինչպիսիք են էլեկտրոնային պիպետները, որտեղ հիբրիդային քայլային շարժիչները նախկինում անհնար էր ինտեգրել:

Մինիատուրացումը շարունակական մտահոգություն է բազմաթիվ ոլորտների համար և վերջին տարիների հիմնական միտումներից մեկն է եղել: Արտադրության, փորձարկման կամ առօրյա լաբորատոր օգտագործման համար օգտագործվող շարժման և դիրքորոշման համակարգերը պահանջում են ավելի փոքր, ավելի հզոր շարժիչներ: Ավտոմոբիլային արդյունաբերությունը երկար ժամանակ նախագծում և արտադրում է փոքր քայլային շարժիչներ, և դեռևս գոյություն չունեն բավականաչափ փոքր շարժիչներ շատ կիրառությունների համար: Երբ շարժիչները բավականաչափ փոքր են, դրանք չունեն կիրառման համար անհրաժեշտ տեխնիկական բնութագրերը, ինչպիսիք են շուկայում մրցունակ լինելու համար անհրաժեշտ բավականաչափ բարձր պտտող մոմենտի կամ արագության ապահովումը: Ցավալի այլընտրանքը մեծ շրջանակով քայլային շարժիչի օգտագործումն է և դրա շուրջը գտնվող բոլոր մյուս բաղադրիչների կծկումը, հաճախ հատուկ փակագծերի և լրացուցիչ սարքավորումների տեղադրման միջոցով: Շարժման կառավարումը այս փոքր տարածքում չափազանց դժվար է, ինչը ստիպում է ինժեներներին զիջումների գնալ սարքի տարածական ճարտարապետության հարցում:
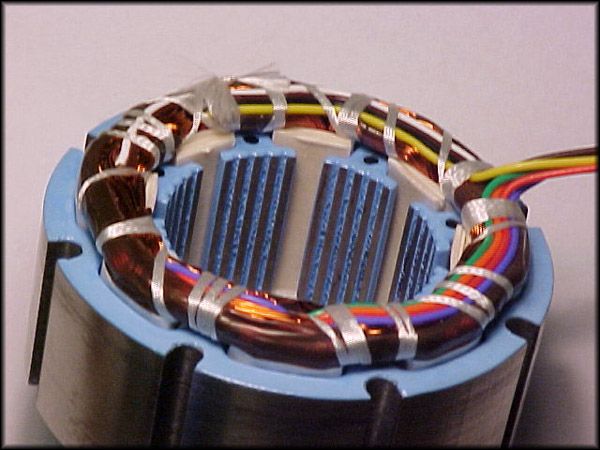
Ստանդարտ անխոզանակ մշտական հոսանքի շարժիչները կառուցվածքային և մեխանիկորեն ինքնաապահով են, որտեղ ռոտորը կախված է ստատորի ներսում՝ երկու ծայրերում գտնվող ծայրային կափարիչներով, և ցանկացած ծայրային սարք, որը պետք է միացվի, սովորաբար ամրացված է ծայրային կափարիչներին, որոնք հեշտությամբ կազմում են շարժիչի ընդհանուր երկարության մինչև 50%-ը: Առանց շրջանակի շարժիչները նվազեցնում են թափոնները և ավելորդությունը՝ վերացնելով լրացուցիչ ամրացման փակագծերի, թիթեղների կամ ամրակների անհրաժեշտությունը, և նախագծման համար անհրաժեշտ բոլոր կառուցվածքային և մեխանիկական հենարանները կարող են անմիջապես ինտեգրվել շարժիչի ներքին մասում: Դրա առավելությունն այն է, որ ստատորը և ռոտորը կարող են անխափան ինտեգրվել համակարգի մեջ՝ նվազեցնելով չափը՝ առանց զոհաբերելու կատարողականությունը:
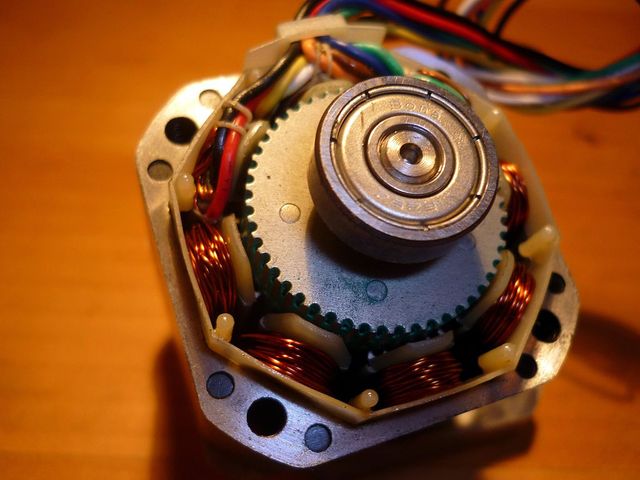
Քայլային շարժիչների մանրացումը մարտահրավեր է, և շարժիչի աշխատանքը ուղղակիորեն կապված է դրա չափսի հետ: Շրջանակի չափի փոքրացմանը զուգընթաց նվազում է նաև ռոտորի մագնիսների և փաթույթների համար նախատեսված տարածքը, ինչը ազդում է ոչ միայն առկա առավելագույն պտտող մոմենտի ելքի, այլև շարժիչի աշխատանքի արագության վրա: NEMA6 չափի հիբրիդային քայլային շարժիչ կառուցելու նախկին փորձերը մեծ մասամբ ձախողվել են, ինչը ցույց է տալիս, որ NEMA6 շրջանակի չափը չափազանց փոքր է որևէ օգտակար աշխատանք ապահովելու համար: Կիրառելով իր փորձը անհատական նախագծման և մի քանի ոլորտներում փորձագիտության մեջ՝ ավտոարդյունաբերությունը կարողացել է հաջողությամբ ստեղծել հիբրիդային քայլային շարժիչի տեխնոլոգիա, որը ձախողվել էր այլ ոլորտներում: NEMA 6 տիպի քայլային շարժիչը ոչ միայն ապահովում է մեծ քանակությամբ օգտագործելի դինամիկ պտտող մոմենտ բարձր արագություններով, այլև ապահովում է բարձր մակարդակի ճշգրտություն:
Տիպիկ մշտական մագնիսով շարժիչով, որն ունի 20 քայլ մեկ պտույտի ընթացքում, կամ 18 աստիճան քայլի անկյուն, 3.46 աստիճանի շարժիչի համեմատ, այն կարող է ապահովել 5.7 անգամ ավելի մեծ լուծաչափ, և այս ավելի բարձր լուծաչափը ուղղակիորեն թարգմանվում է ավելի բարձր ճշգրտության՝ ապահովելով հիբրիդային քայլային շարժիչ: Այս քայլի անկյան փոփոխության և ցածր իներցիայի ռոտորի դիզայնի հետ զուգորդված՝ շարժիչը ունակ է 8000 պտույտ/րոպե մոտեցող արագությունների դեպքում զարգացնել 28 գ-ից ավելի դինամիկ պտտող մոմենտ, ապահովելով ստանդարտ անխոզանակ DC շարժիչի արագության նման կատարողականություն: Քայլի անկյան սովորական 1.8 աստիճանից մինչև 3.46 աստիճան բարձրացնելը թույլ է տալիս նրանց ստանալ գրեթե կրկնակի պահող պտտող մոմենտ՝ համեմատած ամենամոտ մրցակցային դիզայնի հետ, և մինչև 56 գ/դյույմ պահող պտտող մոմենտը՝ գրեթե չորս անգամ ավելի, քան նույն չափի ավանդական PM քայլային շարժիչինը (մինչև 14 գ/դյույմ):
Եզրակացություն
Միկրո քայլային շարժիչներկարող են օգտագործվել տարբեր ոլորտներում, որոնք պահանջում են կոմպակտ կառուցվածք՝ միաժամանակ պահպանելով բարձր մակարդակի ճշգրտություն, հատկապես բժշկական ոլորտում, որտեղ դրանք ավելի մատչելի են՝ շտապ օգնության սենյակից մինչև հիվանդի մահճակալի մոտ և լաբորատոր սարքավորումներ: Ներկայումս մեծ հետաքրքրություն կա ձեռքի պիպետների նկատմամբ: Միկրո քայլային շարժիչները ապահովում են քիմիական նյութերը ճշգրիտ բաշխելու համար անհրաժեշտ բարձր լուծաչափը, և այս շարժիչները առաջարկում են ավելի բարձր պտտող մոմենտ և ավելի բարձր որակ, քան շուկայում առկա այլ համեմատելի արտադրանքները: Լաբորատորիաների համար միկրո քայլային շարժիչները դառնում են որակի չափանիշ: Կոմպակտ չափսը միկրո քայլային շարժիչները դարձնում է կատարյալ լուծում, լինի դա ռոբոտացված ձեռք, թե պարզ XYZ փուլ, քայլային շարժիչները հեշտ են միակցվում և կարող են ապահովել բաց կամ փակ ցիկլի ֆունկցիոնալություն:

Միկրոշարժիչների վերաբերյալ լրացուցիչ հարցերի համար, խնդրում ենք հետևել Vic tech Micro Motor Technology-ին։
Եթե ցանկանում եք շփվել և համագործակցել մեզ հետ, խնդրում ենք կապվել մեզ հետ։
Մենք սերտորեն համագործակցում ենք մեր հաճախորդների հետ՝ լսելով նրանց կարիքները և գործելով նրանց խնդրանքների հիման վրա: Մենք հավատում ենք, որ փոխշահավետ գործընկերությունը հիմնված է ապրանքի որակի և հաճախորդների սպասարկման վրա:
«Չանգժոու Վիկ-թեք Մոթոր Թեքնոլոջի» ՍՊԸ-ն մասնագիտացված հետազոտական և արտադրական կազմակերպություն է, որը կենտրոնանում է շարժիչների հետազոտությունների և զարգացման, շարժիչային կիրառությունների համար ընդհանուր լուծումների, ինչպես նաև շարժիչային արտադրանքի մշակման և արտադրության վրա: ՍՊԸ-ն մասնագիտացած է միկրոշարժիչների և պարագաների արտադրության մեջ 2011 թվականից: Մեր հիմնական արտադրանքն է՝ մանրանկարչական քայլային շարժիչներ, ատամնանիվային շարժիչներ, ատամնանիվային շարժիչներ, ստորջրյա շարժիչներ և շարժիչի շարժիչներ ու կառավարիչներ:

Մեր թիմն ունի ավելի քան 20 տարվա փորձ միկրոշարժիչների նախագծման, մշակման և արտադրության ոլորտում, և կարող է մշակել արտադրանք և օգնել նախագծել հաճախորդներին՝ համապատասխան հատուկ կարիքների: Ներկայումս մենք հիմնականում վաճառում ենք Ասիայի, Հյուսիսային Ամերիկայի և Եվրոպայի հարյուրավոր երկրներում գտնվող հաճախորդներին, ինչպիսիք են ԱՄՆ-ն, Մեծ Բրիտանիան, Կորեան, Գերմանիան, Կանադան, Իսպանիան և այլն: Մեր «ամբողջականությունն ու հուսալիությունը, որակին կողմնորոշված» բիզնես փիլիսոփայությունը, «հաճախորդն առաջին հերթին» արժեքային նորմերը պաշտպանում են կատարողականին կողմնորոշված նորարարությունը, համագործակցությունը, արդյունավետ ձեռնարկատիրական ոգին՝ «կառուցել և կիսվել» սկզբունքը հաստատելու համար: Վերջնական նպատակը մեր հաճախորդների համար առավելագույն արժեք ստեղծելն է:
Հրապարակման ժամանակը. Մարտի 28-2023