




NEMA34 86 մմ գծային հիբրիդային քայլային շարժիչ՝ արտաքին շարժիչով, բարձր հրումով
Նկարագրություն
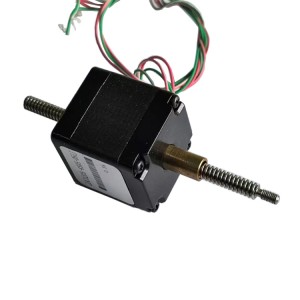
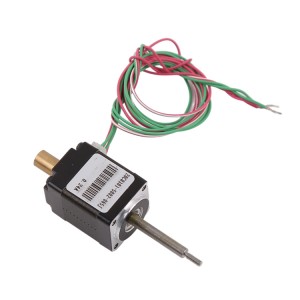
NEMA 34 հիբրիդային քայլային շարժիչը ունի 86 մմ չափս։
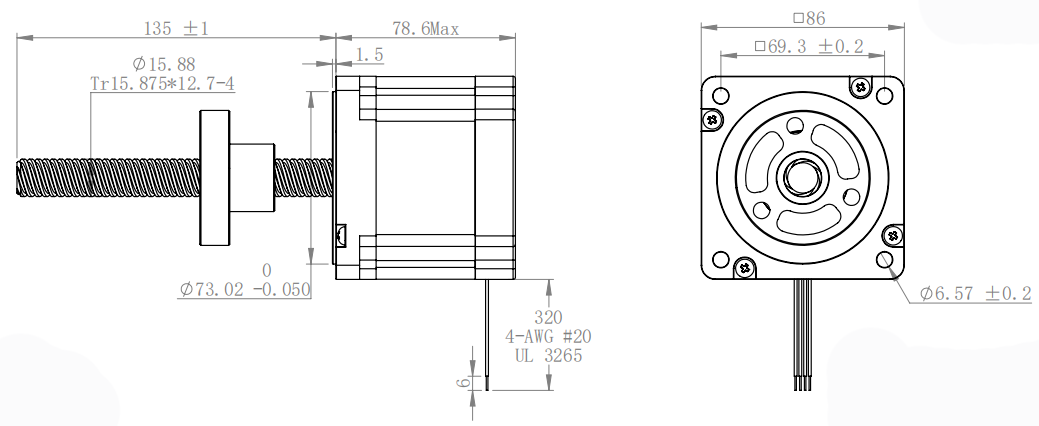
Այն նաև արտաքին փոխանցմամբ գծային քայլային շարժիչ է՝ վերևում գտնվող 135 մմ երկարությամբ կապարային պտուտակային լիսեռով, որը նույնպես տեղավորվում է պլաստիկ ընկույզով/սահիկով։
Առաջատար պտուտակի մոդելի համարն է՝ Tr15.875*P3.175*4N
Առաջատար պտուտակի քայլը 3.17 մմ է, և այն ունի 4 մեկնարկ, ուստի առաջատար պտուտակի քայլը = մեկնարկի համարը * առաջատար պտուտակի քայլը = 4 * 3.175 մմ = 12.7 մմ
Այսպիսով, շարժիչի քայլի երկարությունը կազմում է. 12.7 մմ/200 քայլ = 0.0635 մմ/քայլ
Մենք ունենք նաև այլ տեսակի պտուտակային պտուտակներ տարբերակների համար, դա կախված է հաճախորդի պահանջներից՝ շարժիչի հրման և գծային արագության վերաբերյալ։

Պարամետրեր
| Մոդելի համարը | SM86C0905 |
| Շարժիչի տրամագիծը | 86 մմ (NEMA34) |
| Շարժիչի լարումը | 5V DC |
| Կծիկի դիմադրություն | 1.6Ω±10%/փուլ |
| Փուլերի քանակը | 2 փուլ(երկբևեռ) |
| Քայլի անկյուն | 1.8°/քայլ |
| Գնահատեք հոսանքը | 3.12Ա/փուլ |
| Նվազագույն հրում (300PPS) | 50 կգ |
| Քայլի երկարությունը | 0.0635 մմ/քայլ |
Առաջատար պտուտակի պարամետր
| Առաջատար պտուտակի տեսակը | Սրապեզոիդ պտուտակ |
| Առաջատար պտուտակ, մոդելի համարը | Tr15.875*P3.175*4N |
| Արտաքին տրամագիծը | 15..875 մմ |
| Առաջատար | 12.7 մմ |
| Սկսվում է | 4 |
| Բարձրություն | 3.175 մմ |
| Քայլի երկարությունը | 0.0635 մմ/քայլ |
Դիզայնի նկարչություն
Առաջատար պտուտակի մասին
Գծային հիբրիդային քայլային շարժիչի վրա օգտագործվող կապարային պտուտակը, ընդհանուր առմամբ, սեղանաձև կապարային պտուտակ է։
Օրինակ՝ Tr3.5*P0.3*1N կապարային պտուտակի համար։
Tr նշանակում է տրապեցոիդային կապարային պտուտակի տեսակ
P0.3-ը նշանակում է, որ պտուտակի թեքությունը 0.3 մմ է
1N նշանակում է, որ դա միանգամյա մեկնարկի պտուտակ է։
Առաջատար պտուտակային առաջնորդ = մեկնարկային համար * քայլ
Այսպիսով, այս կոնկրետ միացնող պտուտակի համար դա 0.3 մմ միացնող է։
Հիբրիդային քայլային շարժիչի շարժիչի քայլային անկյունը 1.8 աստիճան/քայլ է, որը մեկ պտույտը կատարելու համար անհրաժեշտ է 200 քայլ։
Քայլի երկարությունը շարժիչի կատարած գծային շարժումն է, երբ այն կատարում է մեկ քայլ։
0.3 մմ տրամագծով պտուտակի համար քայլի երկարությունը կազմում է 0.3 մմ/200 քայլ = 0.0015 մմ/քայլ։
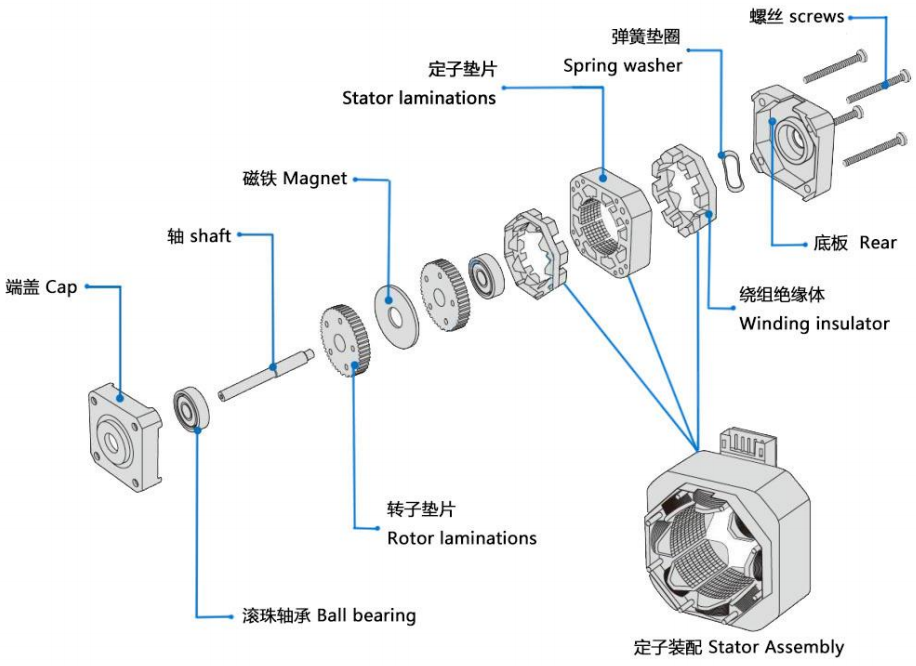
NEMA քայլային շարժիչների հիմնական կառուցվածքը
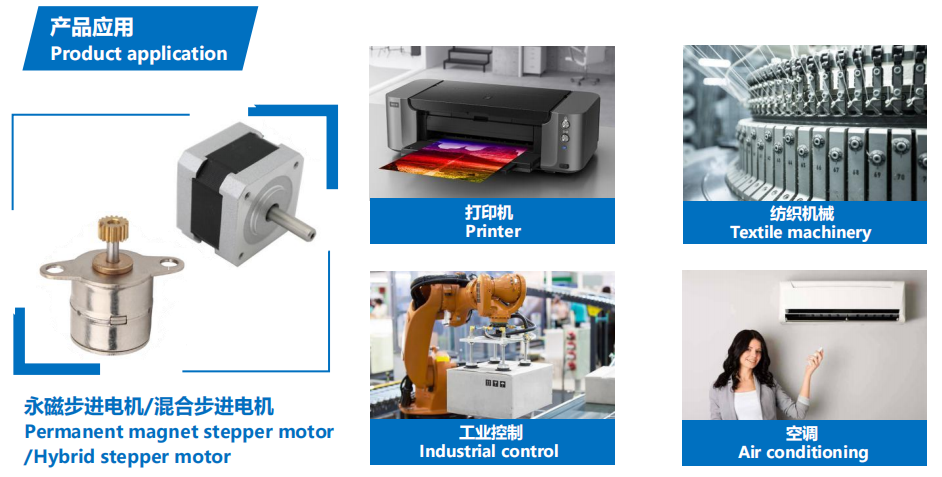
Հիբրիդային քայլային շարժիչի կիրառումը
Հիբրիդային քայլային շարժիչների բարձր լուծաչափի շնորհիվ (200 կամ 400 քայլ մեկ պտույտի համար), դրանք լայնորեն կիրառվում են բարձր ճշգրտություն պահանջող կիրառություններում, ինչպիսիք են՝
3D տպագրություն
Արդյունաբերական կառավարում (CNC, ավտոմատ ֆրեզերային մեքենա, տեքստիլ մեքենաներ)
Համակարգչային ծայրամասային սարքեր
Փաթեթավորման մեքենա
Եվ այլ ավտոմատ համակարգեր, որոնք պահանջում են բարձր ճշգրտության կառավարում:
Հաճախորդները պետք է հետևեն «նախ ընտրեք քայլային շարժիչներ, ապա ընտրեք դրայվեր՝ հիմնվելով առկա քայլային շարժիչի վրա» սկզբունքին։
Հիբրիդային քայլային շարժիչը վարելու համար լավագույնն է չօգտագործել լրիվ քայլային ռեժիմը, քանի որ լրիվ քայլային ռեժիմի դեպքում թրթռումն ավելի մեծ է։
Հիբրիդային քայլային շարժիչն ավելի հարմար է ցածր արագությամբ աշխատանքների համար: Մենք խորհուրդ ենք տալիս, որ արագությունը չգերազանցի 1000 պտույտ/րոպե (6666PPS 0.9 աստիճանի դեպքում), նախընտրելի է 1000-3000PPS (0.9 աստիճանի դեպքում), և այն կարող է միացվել փոխանցման տուփին՝ արագությունը նվազեցնելու համար: Շարժիչը ունի բարձր աշխատանքային արդյունավետություն և ցածր աղմուկ համապատասխան հաճախականության դեպքում:
Պատմական պատճառներով, միայն նոմինալ 12 Վ լարում ունեցող շարժիչն է օգտագործում 12 Վ: Նախագծի գծագրում նշված մյուս անվանական լարումը շարժիչի համար ամենահարմար շարժիչի լարումը չէ: Հաճախորդները պետք է ընտրեն համապատասխան շարժիչի լարումը և համապատասխան շարժիչը՝ հիմնվելով իրենց պահանջների վրա:
Երբ շարժիչն օգտագործվում է բարձր արագությամբ կամ մեծ բեռով, այն, որպես կանոն, անմիջապես չի մեկնարկում աշխատանքային արագությամբ։ Մենք խորհուրդ ենք տալիս աստիճանաբար բարձրացնել հաճախականությունը և արագությունը։ Երկու պատճառով. նախ, շարժիչը չի կորցնում քայլերը, և երկրորդ, այն կարող է նվազեցնել աղմուկը և բարելավել դիրքավորման ճշգրտությունը։
Շարժիչը չպետք է աշխատի թրթռման գոտում (600 PPS-ից ցածր): Եթե այն պետք է օգտագործվի ցածր արագությամբ, թրթռման խնդիրը կարող է նվազեցվել՝ փոխելով լարումը, հոսանքը կամ ավելացնելով որոշակի մարում:
Երբ շարժիչը աշխատում է 600PPS-ից (0.9 աստիճան) ցածր ջերմաստիճանում, այն պետք է աշխատի փոքր հոսանքով, մեծ ինդուկտիվությամբ և ցածր լարմամբ։
Մեծ իներցիայի մոմենտ ունեցող բեռների համար պետք է ընտրել մեծ չափի շարժիչ։
Երբ պահանջվում է ավելի բարձր ճշգրտություն, այն կարելի է լուծել՝ ավելացնելով փոխանցման տուփ, մեծացնելով շարժիչի արագությունը կամ օգտագործելով ենթաբաժինային կառավարում: Կարելի է նաև օգտագործել 5-ֆազային շարժիչ (միաբևեռ շարժիչ), սակայն ամբողջ համակարգի գինը համեմատաբար բարձր է, ուստի այն հազվադեպ է օգտագործվում:
Քայլային շարժիչի չափը՝
Ներկայումս մենք ունենք 20 մմ (NEMA8), 28 մմ (NEMA11), 35 մմ (NEMA14), 42 մմ (NEMA17), 57 մմ (NEMA23), 86 մմ (NEMA34) հիբրիդային քայլային շարժիչներ: Հիբրիդային քայլային շարժիչ ընտրելիս խորհուրդ ենք տալիս նախ որոշել շարժիչի չափը, ապա հաստատել մյուս պարամետրերը:
Անհատականացման ծառայություն
Շարժիչի դիզայնը կարող է ճշգրտվել հաճախորդի պահանջներին համապատասխան, ներառյալ՝
Շարժիչի տրամագիծը՝ մենք ունենք 6 մմ, 8 մմ, 10 մմ, 15 մմ և 20 մմ տրամագծով շարժիչ
Կծիկի դիմադրություն/գնահատված լարում. կծիկի դիմադրությունը կարգավորելի է, և ավելի բարձր դիմադրության դեպքում շարժիչի անվանական լարումն ավելի բարձր է։
Փակագծի դիզայն/գլխիկի պտուտակի երկարություն. եթե հաճախորդը ցանկանում է, որ փակագիծը լինի ավելի երկար/կարճ, հատուկ դիզայնով, ինչպիսիք են ամրացման անցքերը, այն կարգավորելի է։
ՏՀՏ + մալուխներ + միակցիչ. ՏՀՏ-ի դիզայնը, մալուխի երկարությունը և միակցիչի քայլը կարգավորելի են, դրանք կարող են փոխարինվել FPC-ով, եթե հաճախորդները պահանջեն։
Առաջադրման ժամանակ
Եթե մենք ունենք նմուշներ պահեստում, մենք կարող ենք նմուշներ ուղարկել 3 օրվա ընթացքում։
Եթե մենք չունենք նմուշներ պահեստում, մենք պետք է դրանք արտադրենք, արտադրության ժամանակը մոտ 20 օրացուցային օր է։
Զանգվածային արտադրության դեպքում, պատվերի ժամկետը կախված է պատվերի քանակից։
Վճարման եղանակը և վճարման պայմանները
Նմուշների համար, ընդհանուր առմամբ, մենք ընդունում ենք Paypal կամ Alibaba:
Զանգվածային արտադրության համար մենք ընդունում ենք T/T վճարում:
Նմուշների համար մենք հավաքում ենք ամբողջական վճարումը արտադրությունից առաջ։
Զանգվածային արտադրության համար մենք կարող ենք ընդունել 50% նախավճար արտադրությունից առաջ, իսկ մնացած 50% վճարումը հավաքել առաքումից առաջ։
6 անգամից ավելի պատվերի համար համագործակցելուց հետո մենք կարող ենք բանակցել այլ վճարման պայմանների, ինչպիսիք են՝ A/S-ը (տեսողությունից հետո)
Հաճախակի տրվող հարցեր
1. Որքա՞ն է նմուշների ընդհանուր առաքման ժամկետը: Որքա՞ն է մեծ պատվերների առաքման ժամկետը հետին պլանի համար:
Նմուշի պատվերի ժամկետը մոտ 15 օր է, զանգվածային քանակի պատվերի ժամկետը՝ 25-30 օր։
2. Դուք ընդունո՞ւմ եք անհատական ծառայություններ:
Մենք ընդունում ենք ապրանքների անհատականացում, ներառյալ շարժիչի պարամետրը, կապարի լարի տեսակը, ելքային լիսեռը և այլն:
3. Հնարավո՞ր է այս շարժիչին կոդավորիչ ավելացնել։
Այս տեսակի շարժիչի համար մենք կարող ենք կոդավորիչ ավելացնել շարժիչի մաշվածության գլխիկի վրա։
Հաճախակի տրվող հարց
1. Ի՞նչ տարբերություն կա քայլային շարժիչների երկբևեռ և միաբևեռ միացումների միջև։
Երկբևեռ միացումներով քայլային շարժիչները օգտագործում են շարժիչի մեթոդ, որի դեպքում հոսանքը հոսում է երկու ուղղություններով մեկ փաթույթում (երկբևեռ շարժիչ):
Միաբևեռ միացմամբ քայլային շարժիչն ունի կենտրոնական ծորակ և օգտագործում է կառավարման մեթոդ, որի դեպքում հոսանքը միշտ հոսում է ֆիքսված ուղղությամբ մեկ փաթույթում (միաբևեռ կառավարման համակարգ):
2. Քայլային շարժիչը մեկնարկ-կանգառի ռեժիմում չի կարող սկսել պատճառները և մշակման մեթոդները
ա. բեռը չափազանց մեծ է. շարժիչի ընտրության սխալ, ընտրեք շարժիչի ավելի մեծ չափս։
բ. հաճախականությունը չափազանց բարձր է. նվազեցրեք հաճախականությունը
գ. Եթե շարժիչը տատանվում է առաջ-ետ, կամ պտտող մոմենտը շատ փոքր է, ինչը ցույց է տալիս փուլի վնաս կամ շղթայի խզում, փոխարինեք կամ վերանորոգեք շարժիչը։
դ. Փուլային հոսանքը բավարար չէ. Մեծացրեք փուլային հոսանքը, գոնե մեկնարկի առաջին մի քանի քայլերի համար։
3. Արագացումն ավարտող, բայց կայուն արագության հասնելուն պես դադարող քայլային շարժիչների պատճառները և լուծումները։
Պատճառ՝ քայլային շարժիչը աշխատում է իր հզորության սահմանաչափով և կանգ է առնում չափազանց արագացման պատճառով։ Ռոտորը տատանվում է և անկայուն է աշխատում։
Լուծում։
① Նվազեցրեք արագացումը, այսինքն՝ ընտրեք ավելի ցածր արագացում կամ օգտագործեք երկու տարբեր արագացման մակարդակներ՝ ավելի բարձր սկզբում և ավելի ցածր՝ առավելագույն արագությանը մոտ։
②Մեծացրեք պտտող մոմենտը
③ Ավելացրեք մեխանիկական ամորտիզատոր հետևի լիսեռին, բայց դա մեծացնում է ռոտորի իներցիան
④Վարեք բաժանմունքային մեքենայով
Ուղարկեք ձեր հաղորդագրությունը մեզ՝
Ապրանքների կատեգորիաներ
-
NEMA11 28 մմ գծային հիբրիդային քայլային շարժիչ առանց գլխարկի...
-

28 մմ չափի NEMA11 հիբրիդային քայլային շարժիչ 1.8 աստիճան ...
-

Բարձր ճշգրտության 42 մմ քայլային շարժիչ NEMA 17 հիբրիդային ...
-
20 մմ NEMA8 գծային հիբրիդային քայլային շարժիչ՝ վազքով...
-

Մոլորակային փոխանցման տուփի քայլային շարժիչ 35 մմ (NEMA 14) ...
-

Բարձր պտտող մոմենտ NEMA 23 հիբրիդային քայլային շարժիչ 57 մմ մ...