




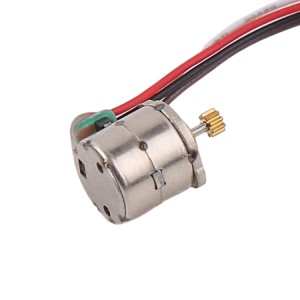
Բարձր պտտող մոմենտով միկրո 35 մմ քայլային շարժիչ տպիչի համար
Նկարագրություն
Քայլային շարժիչների փաթաթման երկու եղանակ կա՝ երկբևեռ և միաբևեռ։
1. Երկբևեռ շարժիչներ
Մեր երկբևեռ շարժիչները սովորաբար ունեն միայն երկու փուլ՝ A փուլ և B փուլ, և յուրաքանչյուր փուլ ունի երկու ելքային լար, որոնք առանձին փաթույթներ են։ Երկու փուլերի միջև կապ չկա։ Երկբևեռ շարժիչներն ունեն 4 ելքային լար։
2. Միաբևեռ շարժիչներ
Մեր միաբևեռ շարժիչները սովորաբար ունեն չորս փուլ։ Երկբևեռ շարժիչների երկու փուլերի հիման վրա ավելացվում են երկու ընդհանուր գծեր։
Եթե ընդհանուր լարերը միացված են միմյանց, ապա ելքային լարերը 5 լար են։
Եթե ընդհանուր լարերը միացված չեն միմյանց, ելքային լարերը 6 լար են։
Միաբևեռ շարժիչն ունի 5 կամ 6 ելքային գիծ։
Պարամետրեր
| Լարում | 8DV DC |
| Փուլերի քանակը | 4 փուլ |
| Քայլի անկյուն | 7.5°±7% |
| Փաթաթման դիմադրություն (25℃) | 16Ω ± 10% |
| Ընթացիկ փուլ | 0.5Ա |
| Հակադարձող մոմենտ | ≤110 գ.սմ |
| Առավելագույն քաշման արագություն | 400PPS |
| Պահող մոմենտ | 450 գ.սմ |
| Փաթաթման ջերմաստիճանը | ≤85 հազար |
| Դիդլեկտրիկ ուժ | 600 ՎԱԿ 1ՎԿ 1մԱ |
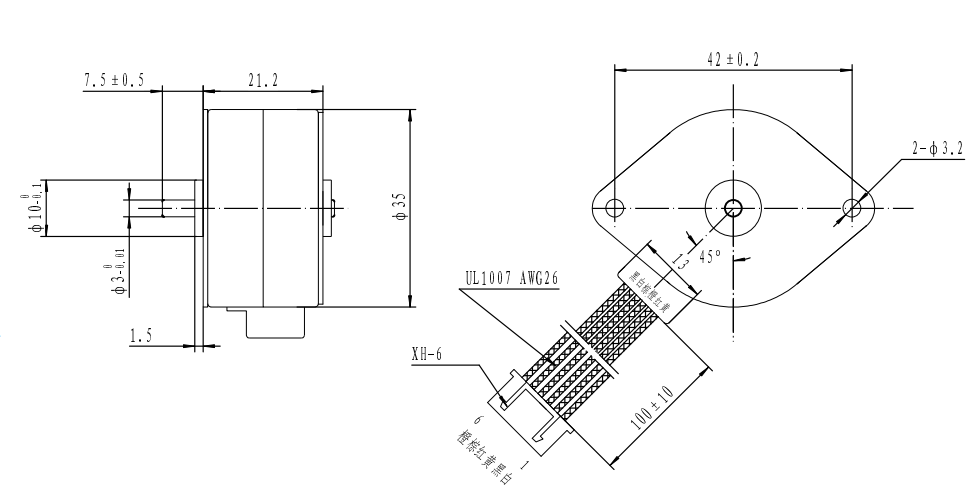
Դիզայնի նկարչություն
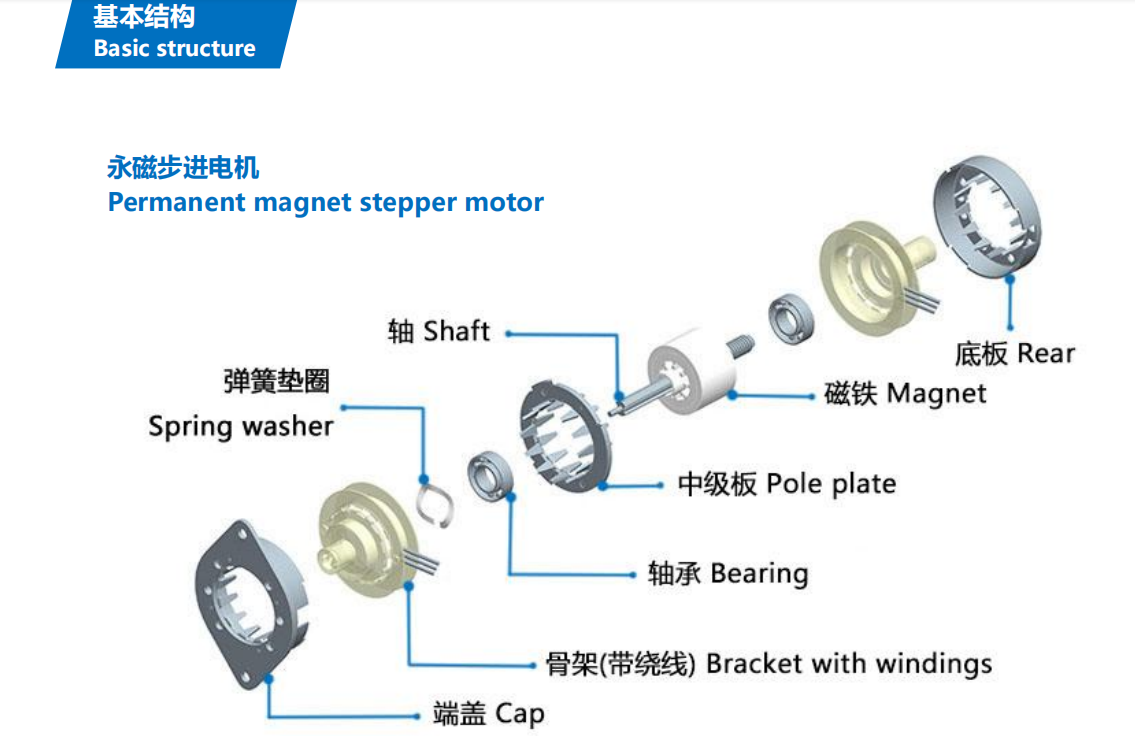
PM քայլային շարժիչի հիմնական կառուցվածքի մասին
Հատկանիշներ և առավելություններ
1. Բարձր ճշգրտության դիրքավորում
Քանի որ քայլային սարքերը շարժվում են ճշգրիտ կրկնվող քայլերով, դրանք գերազանցում են ճշգրիտ
դիրքավորումը՝ շարժիչի շարժման քայլերի քանակով
2. Բարձր ճշգրտության արագության կառավարում
Շարժման ճշգրիտ աճը նաև թույլ է տալիս գերազանց կերպով վերահսկել պտտման արագությունը գործընթացի համար
ավտոմատացում և ռոբոտաշինություն։ Պտտման արագությունը որոշվում է իմպուլսների հաճախականությամբ։
3. Դադարի և պահման գործառույթ
Շարժիչի կառավարման միջոցով շարժիչն ունի կողպման ֆունկցիա (շարժիչի փաթույթներով հոսանք է անցնում, բայց
շարժիչը չի պտտվում), և դեռևս առկա է պահպանման մոմենտի ելք։
4. Երկար կյանք և ցածր էլեկտրամագնիսական միջամտություն
Քայլային շարժիչը խոզանակներ չունի և խոզանակներով փոխարինելու կարիք չունի, ինչպես խոզանակով շարժիչը։
Մշտական հոսանքի շարժիչ։ Խոզանակների միջև շփում չկա, ինչը մեծացնում է ծառայության ժամկետը, էլեկտրական կայծեր չունի և նվազեցնում է էլեկտրամագնիսական խանգարումները։
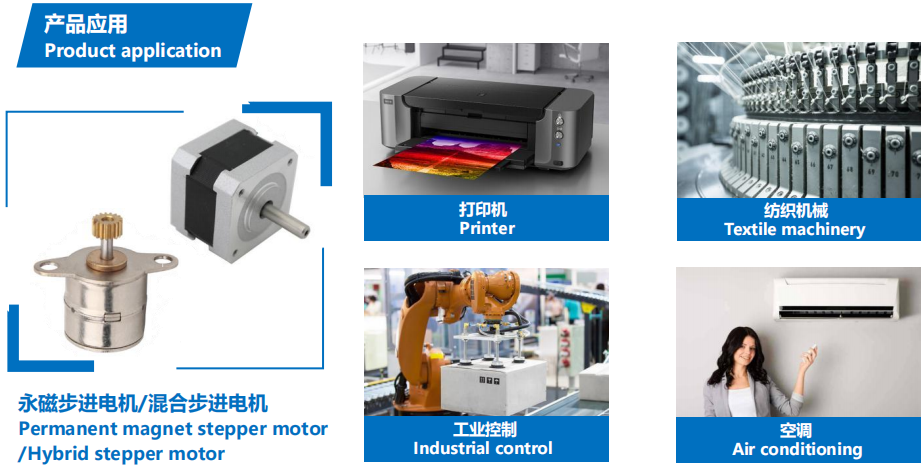
PM քայլային շարժիչի կիրառումը
Տպիչ
Տեքստիլ մեքենաներ
Արդյունաբերական վերահսկողություն
Օդորակիչ
Քայլային շարժիչի աշխատանքի սկզբունքը
Քայլային շարժիչի շարժիչը կառավարվում է ծրագրային ապահովմամբ։ Երբ շարժիչը պետք է պտտվի, շարժիչը կաշխատի։
կիրառեք քայլային շարժիչի իմպուլսները: Այս իմպուլսները որոշակի հերթականությամբ էներգիա են հաղորդում քայլային շարժիչներին, դրանով իսկ
շարժիչի ռոտորը որոշակի ուղղությամբ պտտեցնելով (ժամացույցի սլաքի ուղղությամբ կամ ժամացույցի սլաքի հակառակ ուղղությամբ): Որպեսզի
ապահովել շարժիչի ճիշտ պտույտը։ Ամեն անգամ, երբ շարժիչը ստանում է իմպուլս դրայվերից, այն կպտտվի քայլի անկյան տակ (լիաաստիճան փոխանցման դեպքում), և շարժիչի պտտման անկյունը որոշվում է փոխանցված իմպուլսների քանակով և քայլի անկյան տակ։
Արտադրության ժամկետը և փաթեթավորման մասին տեղեկությունները
Նմուշների մատակարարման ժամկետը՝
Ստանդարտ շարժիչներ պահեստում՝ 3 օրվա ընթացքում
Ստանդարտ շարժիչներ չկան պահեստում՝ 15 օրվա ընթացքում
Անհատականացված արտադրանք՝ մոտ 25~30 օր (կախված անհատականացման բարդությունից)
Նոր կաղապարի կառուցման ժամկետը՝ ընդհանուր առմամբ մոտ 45 օր
Զանգվածային արտադրության ժամկետը՝ պատվերի քանակի հիման վրա
Փաթեթավորում:
Նմուշները փաթեթավորված են փրփուրե սպունգի մեջ՝ թղթե տուփով, առաքվում են էքսպրես փոստով
Զանգվածային արտադրություն, շարժիչները փաթեթավորված են ալիքավոր ստվարաթղթե տուփերի մեջ՝ արտաքինից թափանցիկ թաղանթով (առաքումը՝ օդային ճանապարհով):
Ծովային ճանապարհով առաքման դեպքում ապրանքը կփաթեթավորվի պալետների վրա

Վճարման եղանակը և վճարման պայմանները
Նմուշների համար, ընդհանուր առմամբ, մենք ընդունում ենք Paypal կամ Alibaba:
Զանգվածային արտադրության համար մենք ընդունում ենք T/T վճարում:
Նմուշների համար մենք հավաքում ենք ամբողջական վճարումը արտադրությունից առաջ։
Զանգվածային արտադրության համար մենք կարող ենք ընդունել 50% նախավճար արտադրությունից առաջ, իսկ մնացած 50% վճարումը հավաքել առաքումից առաջ։
6 անգամից ավելի պատվերի համար համագործակցելուց հետո մենք կարող ենք բանակցել այլ վճարման պայմանների, ինչպիսիք են՝ A/S-ը (տեսողությունից հետո)
Ուղարկեք ձեր հաղորդագրությունը մեզ՝
Ապրանքների կատեգորիաներ
-

20 մմ միկրո քայլային շարժիչը կարող է համընկնել g-ի հետ...
-

15by միկրո քայլային շարժիչ 2-փուլ 4-մետաղալար 18 աստիճան ...
-

ցածր աղմուկի բարձր որակի 3.3V 6 մմ միկրո քայլային մ...
-
8 մմ մինի միկրո քայլային շարժիչ 2 փուլ 18 աստիճան ...
-

10BY մինի 5v 10 մմ տրամագծով միկրո քայլային շարժիչ ...
-

20 մմ մշտական մագնիսով 12V միկրո քայլային շարժիչ...