.jpg)
.jpg)
.jpg)
.jpg)
Nema 23 (57 մմ) հիբրիդային քայլային շարժիչ, երկբևեռ, 4-մղիչ, ACME պտուտակային միացումով, ցածր աղմուկով, երկար ծառայության ժամկետով, բարձր արդյունավետությամբ։
Nema 23 (57 մմ) հիբրիդային քայլային շարժիչ, երկբևեռ, 4-մղիչ, ACME պտուտակային միացումով, ցածր աղմուկով, երկար ծառայության ժամկետով, բարձր արդյունավետությամբ։
Այս 57 մմ հիբրիդային քայլային շարժիչը հասանելի է երեք տեսակի՝ արտաքին շարժիչով, միջանցիկ առանցքով և միջանցիկ ֆիքսված առանցքով: Դուք կարող եք ընտրել ձեր կոնկրետ կարիքներին համապատասխան:
Այս շարժիչը հասանելի է 20 մմ, 28 մմ, 35 մմ, 42 մմ, 57 մմ, 86 մմ չափսերով
Քայլի երկարությունը՝ 0.001524 մմ~0.127 մմ
Առավելագույն հզորություն՝ մինչև 240 կգ, ջերմաստիճանի ցածր բարձրացում, ցածր թրթռում, ցածր աղմուկ, երկար ծառայության ժամկետ (մինչև 5 միլիոն ցիկլ), բարձր դիրքորոշման ճշգրտություն (մինչև ±0.01 մմ)
Նկարագրություններ
| Արտադրանքի անվանումը | 57 մմ հիբրիդային քայլային շարժիչներ |
| Մոդել | VSM57HSM |
| Տեսակ | հիբրիդային քայլային շարժիչներ |
| Քայլի անկյուն | 1.8° |
| Լարում (Վ) | 2.3 / 3 / 3.1 / 3.8 |
| Հոսանք (Ա) | 3/4 |
| Դիմադրություն (Օհմ) | 0.75 / 1 / 0.78 / 0.95 |
| Ինդուկտիվություն (մՀ) | 2.5 / 4.5 / 3.3 / 4.5 |
| Առաջատար լարեր | 4 |
| Շարժիչի երկարությունը (մմ) | 45 / 55 / 65 / 75 |
| Շրջակա միջավայրի ջերմաստիճանը | -20℃ ~ +50℃ |
| Ջերմաստիճանի բարձրացում | Առավելագույնը՝ 80 հազար |
| Դիէլեկտրիկ ամրություն | 1մԱ առավելագույնը @ 500Վ, 1ԿՀց, 1վրկ։ |
| Մեկուսացման դիմադրություն | 100 ՄΩ Նվազագույնը @500 Վ հաստատուն հոսանք |
Հավաստագրեր

Էլեկտրական պարամետրեր՝
| Շարժիչի չափը | Լարում /Փուլ (Վ) | Ընթացիկ /Փուլ (Ա) | Դիմադրություն /Փուլ (Ω) | Ինդուկտիվություն /Փուլ (մՀ) | Քանակը Առաջատար լարեր | Ռոտորի իներցիա (գ.սմ2) | Շարժիչի քաշը (գ) | Շարժիչի երկարությունը՝ Լ (մմ) |
| 57 | 2.3 | 3 | 0.75 | 2.5 | 4 | 150 | 580 | 45 |
| 57 | 3 | 3 | 1 | 4.5 | 4 | 300 | 710 | 55 |
| 57 | 3.1 | 4 | 0.78 | 3.3 | 4 | 400 | 880 | 65 |
| 57 | 3.8 | 4 | 0.95 | 4.5 | 4 | 480 | 950 | 75 |
Առաջատար պտուտակի տեխնիկական բնութագրերը և կատարողականի պարամետրերը
| Տրամագիծ (մմ) | Առաջատար (մմ) | Քայլ (մմ) | Ինքնաամրապնդող ուժով անջատում (Հյուսիս) |
| 9.525 | 1.27 | 0.00635 | 800 |
| 9.525 | 2.54 | 0.0127 | 300 |
| 9.525 | 5.08 | 0.0254 | 90 |
| 9.525 | 10.16 | 0.0508 | 30 |
| 9.525 | 25.4 | 0.127 | 6 |
Նշում. Առաջատար պտուտակի ավելի մանրամասն տեխնիկական բնութագրերի համար խնդրում ենք կապվել մեզ հետ։
VSM57HSM ստանդարտ արտաքին շարժիչի ուրվագծային նկար՝
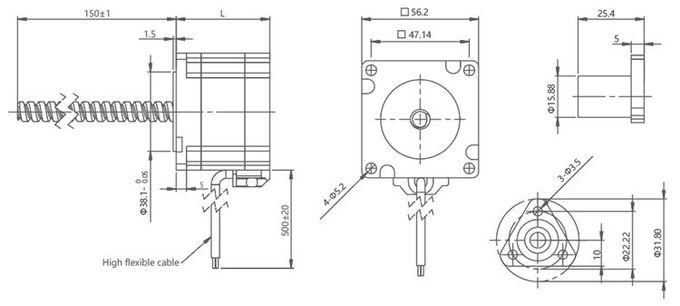
Նշումներ՝
Առաջատար պտուտակի երկարությունը կարող է հարմարեցվել
Անհատականացված մեքենայացումը կենսունակ է կապարի պտուտակի վերջում
57 մմ հիբրիդային քայլային շարժիչների ստանդարտ ամրացված շարժիչի ուրվագծային նկար՝
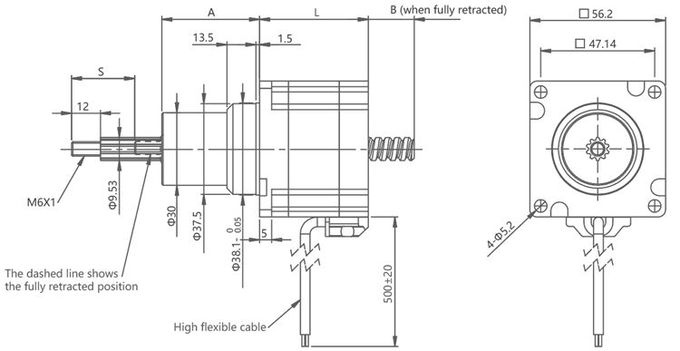
Նշումներ՝
Անհատականացված մեքենայացումը կենսունակ է կապարի պտուտակի վերջում
| Հարված S (մմ) | Չափս Ա (մմ) | Չափս B (մմ) | |||
| Լ = 45 | Լ = 55 | Լ = 65 | Լ = 75 | ||
| 12.7 | 24.1 | 1.1 | 0 | 0 | 0 |
| 19.1 | 30.5 | 7.5 | 0 | 0 | 0 |
| 25.4 | 36.8 | 13.8 | 4.8 | 0 | 0 |
| 31.8 | 43.2 | 20.2 | 11.2 | 0.2 | 0 |
| 38.1 | 49.5 | 26.5 | 17.5 | 6.5 | 0 |
| 50.8 | 62.2 | 39.2 | 30.2 | 19.2 | 9.1 |
| 63.5 | 74.9 | 51.9 | 42.9 | 31.9 | 21.9 |
57 մմ հիբրիդային քայլային շարժիչի ստանդարտ ֆիքսված շարժիչի ուրվագծային նկար
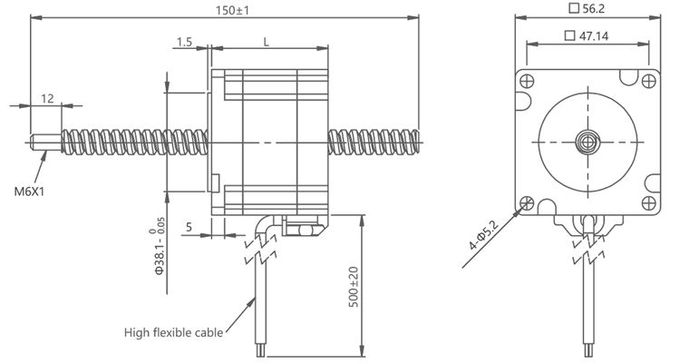
Նշումներ՝
Առաջատար պտուտակի երկարությունը կարող է հարմարեցվել
Անհատականացված մեքենայացումը կենսունակ է կապարի պտուտակի վերջում
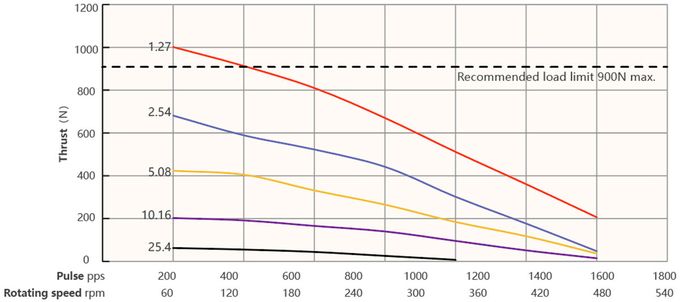
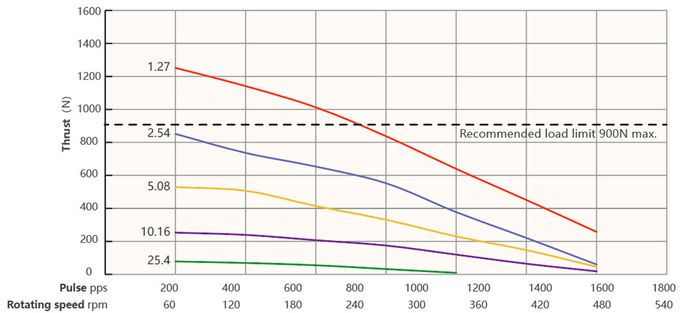
Արագության և հրման կորը.
57 շարքի 45 մմ երկբևեռ շարժիչի երկարությամբ չոփերային շարժիչ
100% հոսանքի իմպուլսային հաճախականություն և հրման կոր (Φ9.525 մմ կապարային պտուտակ)
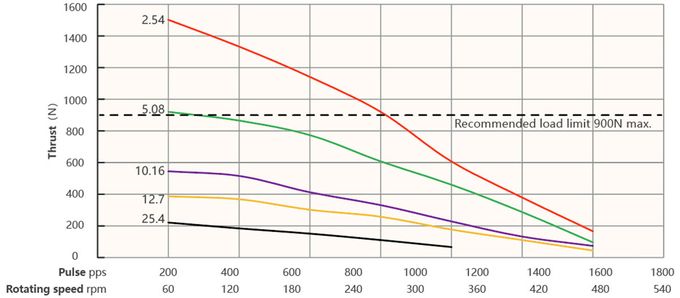
57 շարքի 55 մմ երկբևեռ շարժիչի երկարությամբ չոփերային շարժիչ
100% հոսանքի իմպուլսային հաճախականություն և հրման կոր (Φ9.525 մմ կապարային պտուտակ)
| Կապար (մմ) | Գծային արագություն (մմ/վ) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 2.54 | 2.54 | 5.08 | 7.62 | 10.16 | 12.7 | 15.24 | 17.78 | 20.32 | 22.86 |
| 5.08 | 5.08 | 10.16 | 15.24 | 20.32 | 25.4 | 30.48 | 35.56 | 40.64 | 45.72 |
| 10.16 | 10.16 | 20.32 | 30.48 | 40.64 | 50.8 | 60.96 | 71.12 | 81.28 | 91.44 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 711.8 | 203.2 | 228.6 |
Փորձարկման պայման՝
Չոպպերային շարժիչ, առանց թեքահարթակի, կիսա-միկրո-քայլային, շարժիչի լարում 40 Վ
57 շարքի 65 մմ շարժիչի երկարությամբ երկբևեռ չոփերային շարժիչ
100% հոսանքի իմպուլսային հաճախականություն և հրման կոր (Φ9.525 մմ կապարային պտուտակ)
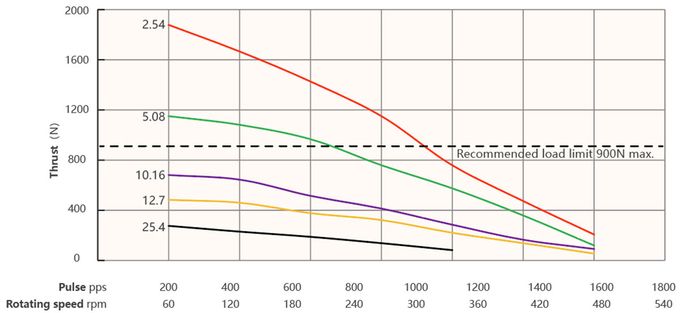
57 շարքի 75 մմ երկարությամբ երկբևեռ շարժիչի չոփերային շարժիչ
100% հոսանքի իմպուլսային հաճախականություն և հրման կոր (Φ9.525 մմ կապարային պտուտակ)
| Կապար (մմ) | Գծային արագություն (մմ/վ) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 2.54 | 2.54 | 5.08 | 7.62 | 10.16 | 12.7 | 15.24 | 17.78 | 20.32 | 22.86 |
| 5.08 | 5.08 | 10.16 | 15.24 | 20.32 | 25.4 | 30.48 | 35.56 | 40.64 | 45.72 |
| 10.16 | 10.16 | 20.32 | 30.48 | 40.64 | 50.8 | 60.96 | 71.12 | 81.28 | 91.44 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 711.8 | 203.2 | 228.6 |
Փորձարկման պայման՝
Չոպպերային շարժիչ, առանց թեքահարթակի, կիսա-միկրո-քայլային, շարժիչի լարում 40 Վ
Կիրառման ոլորտներ
3D տպագրություն։57 մմ հիբրիդային քայլային շարժիչները լայնորեն օգտագործվում են 3D տպիչներում՝ տպիչի գլխիկի դիրքը և շարժումը կառավարելու համար։
CNC հաստոցներ՝Համակարգչային թվային կառավարման (CNC) հաստոցներում 57 մմ հիբրիդային քայլային շարժիչներն օգտագործվում են կտրող գործիքների շարժումը կառավարելու համար՝ ճշգրիտ մեքենայական գործողությունների համար։
Ավտոմատացման սարքավորումներ.57 մմ հիբրիդային քայլային շարժիչները կարող են օգտագործվել տարբեր ավտոմատացման սարքավորումներում, ինչպիսիք են ավտոմատ փաթեթավորման մեքենաները, ավտոմատ տեսակավորման համակարգերը, ավտոմատ հավաքման գծերը և այլն, շարժումը և դիրքավորումը կառավարելու համար:
Տեքստիլ մեքենաներ.Տեքստիլ արդյունաբերության մեջ 57 մմ հիբրիդային քայլային շարժիչները կարող են օգտագործվել մանող մեքենաները, հաստոցները և այլ սարքավորումները կառավարելու համար՝ տեքստիլ գործընթացի ճշգրտությունն ու կայունությունն ապահովելու համար։
Բժշկական սարքավորումներ՝57 մմ հիբրիդային քայլային շարժիչները լայնորեն կիրառվում են բժշկական սարքավորումներում, ինչպիսիք են բժշկական ներարկիչների պոմպերը, բժշկական ռոբոտները, պատկերի սկանավորման սարքավորումները և այլն՝ ճշգրիտ դիրքի և շարժման կառավարման համար:
Ռոբոտաշինություն։57 մմ հիբրիդային քայլային շարժիչները օգտագործվում են ռոբոտաշինության տարբեր ոլորտներում, այդ թվում՝ արդյունաբերական ռոբոտներում, սպասարկման ռոբոտներում, համագործակցային ռոբոտներում և այլն, ճշգրիտ շարժման և մանիպուլյացիայի համար։
Ավտոմատացված պահեստավորման համակարգեր.Ավտոմատացված պահեստավորման և լոգիստիկ համակարգերում 57 մմ հիբրիդային քայլային շարժիչները կարող են օգտագործվել փոխադրիչ ժապավենները, վերելակները, կուտակիչ կռունկները և այլ սարքավորումները կառավարելու համար՝ իրերի ճշգրիտ դիրքավորումը և մշակումը ապահովելու համար։
Սրանք 57 մմ հիբրիդային քայլային շարժիչների բնորոշ կիրառություններից միայն մի քանիսն են, և իրականում դրանք լայնորեն կիրառվում են շատ այլ ոլորտներում, ներառյալ տպագրական սարքավորումները, անվտանգության համակարգերը, ճշգրիտ գործիքները և այլն:
Առավելություն
Բարձր պտտող մոմենտի և չափի հարաբերակցություն՝Չնայած իրենց կոմպակտ չափսերին, 57 մմ հիբրիդային քայլային շարժիչները կարող են ապահովել բարձր պտտող մոմենտ։ Սա դրանք հարմար է դարձնում այն կիրառությունների համար, որտեղ տարածքը սահմանափակ է, բայց պահանջվում է բարձր պտտող մոմենտ։
Բաց ցիկլի կառավարում.Հիբրիդային քայլային շարժիչները կարող են աշխատել բաց ցիկլի կառավարման համակարգում, ինչը նշանակում է, որ դրանք չեն պահանջում դիրքի հետադարձ կապի սարքեր, ինչպիսիք են կոդավորիչները: Սա պարզեցնում է կառավարման համակարգը և նվազեցնում ընդհանուր ծախսերը:
Ճշգրիտ դիրքավորում.Հիբրիդային քայլային շարժիչները ապահովում են ճշգրիտ դիրքորոշման հնարավորություններ՝ շնորհիվ իրենց բնորոշ քայլային լուծաչափի։ Դրանք կարող են շարժվել փոքր քայլերով, ինչը թույլ է տալիս ապահովել ճշգրիտ դիրքորոշում և կրկնելիություն։
Հարթ գործողություն.Հիբրիդային քայլային շարժիչները կարող են ապահովել սահուն աշխատանք, հատկապես միկրոքայլային տեխնիկայով աշխատելիս։ Միկրոքայլային շարժիչները յուրաքանչյուր քայլը բաժանում են ավելի փոքր ենթաքայլերի, ինչը հանգեցնում է ավելի սահուն շարժման և թրթռման նվազեցման։
Արագ արձագանքման ժամանակը՝Հիբրիդային քայլային շարժիչները ունեն արագ արձագանքման ժամանակ, ինչը հնարավորություն է տալիս արագ արագացնել և դանդաղեցնել: Այս առանձնահատկությունը օգտակար է դինամիկ և ճկուն շարժումներ պահանջող կիրառությունների համար:
Բարձր հուսալիություն և դիմացկունություն.Հիբրիդային քայլային շարժիչները հայտնի են իրենց կայունությամբ և հուսալիությամբ։ Դրանք ունեն երկար շահագործման ժամկետ, ցածր սպասարկման պահանջներ և կարող են դիմակայել դժվար շահագործման պայմաններին։
Արդյունավետ լուծում՝Համեմատած այլ շարժման կառավարման տեխնոլոգիաների հետ, ինչպիսիք են սերվոշարժիչները, հիբրիդային քայլային շարժիչները, ընդհանուր առմամբ, առաջարկում են ավելի մատչելի լուծում: Դրանք ապահովում են լավ հավասարակշռություն կատարողականի և մատչելիության միջև:
Հեշտ ինտեգրում.Հիբրիդային քայլային շարժիչները լայնորեն մատչելի են և համատեղելի են տարբեր շարժիչային էլեկտրոնիկայի և կառավարման համակարգերի հետ։ Դրանք կարող են հեշտությամբ ինտեգրվել տարբեր տեսակի մեքենաների և ավտոմատացման կարգավորումների մեջ։
Էներգաարդյունավետություն.Հիբրիդային քայլային շարժիչները էներգիա են սպառում միայն շարժման մեջ, ինչը դրանք դարձնում է էներգաարդյունավետ: Երբ դրանք անշարժ են, դրանք անընդհատ սնուցման կարիք չունեն, ինչը նպաստում է ընդհանուր էներգախնայողությանը:
Շարժիչի ընտրության պահանջները.
► Շարժման/տեղադրման ուղղություն
► Բեռնման պահանջներ
►Կաթվածի պահանջներ
► Վերջնական մեքենայացման պահանջներ
►Ճշգրտության պահանջներ
►Կոդավորիչի հետադարձ կապի պահանջներ
► Ձեռքով կարգավորման պահանջներ
► Շրջակա միջավայրի պահանջներ
Արտադրական արհեստանոց


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)