.jpg)
.jpg)
.jpg)
.jpg)
Nema 17 (42 մմ) հիբրիդային քայլային շարժիչ, երկբևեռ, 4-հաղորդիչ, ACME հաղորդիչ պտուտակով, քայլի անկյուն 1.8°, երկար ծառայության ժամկետ, բարձր արդյունավետություն։
Nema 17 (42 մմ) հիբրիդային քայլային շարժիչ, երկբևեռ, 4-հաղորդիչ, ACME հաղորդիչ պտուտակով, քայլի անկյուն 1.8°, երկար ծառայության ժամկետ, բարձր արդյունավետություն։
Այս 42 մմ հիբրիդային քայլային շարժիչը հասանելի է երեք տեսակի՝ արտաքին շարժիչով, միջանցիկ առանցքով և միջանցիկ ֆիքսված առանցքով: Դուք կարող եք ընտրել ձեր կոնկրետ կարիքներին համապատասխան:
Նկարագրություններ
| Արտադրանքի անվանումը | 42 մմ հիբրիդային քայլային շարժիչներ |
| Մոդել | VSM42HSM |
| Տեսակ | հիբրիդային քայլային շարժիչներ |
| Քայլի անկյուն | 1.8° |
| Լարում (Վ) | 2/2.6/ 3.3 |
| Հոսանք (Ա) | 1.5/2.5 |
| Դիմադրություն (Օհմ) | 0.8/1.8/2.2 |
| Ինդուկտիվություն (մՀ) | 1.8/2.8/4.6 |
| Առաջատար լարեր | 4 |
| Շարժիչի երկարությունը (մմ) | 34/48/46 |
| Շրջակա միջավայրի ջերմաստիճանը | -20℃ ~ +50℃ |
| Ջերմաստիճանի բարձրացում | Առավելագույնը՝ 80 հազար |
| Դիէլեկտրիկ ամրություն | 1մԱ առավելագույնը @ 500Վ, 1ԿՀց, 1վրկ։ |
| Մեկուսացման դիմադրություն | 100 ՄΩ Նվազագույնը @500 Վ հաստատուն հոսանք |
Հավաստագրեր

Էլեկտրական պարամետրեր՝
| Շարժիչի չափը | Լարում /Փուլ (Վ) | Ընթացիկ /Փուլ (Ա) | Դիմադրություն /Փուլ (Ω) | Ինդուկտիվություն /Փուլ (մՀ) | Քանակը Առաջատար լարեր | Ռոտորի իներցիա (գ.սմ2) | Շարժիչի քաշը (գ) | Շարժիչի երկարությունը՝ Լ (մմ) |
| 42 | 2.6 | 1.5 | 1.8 | 2.6 | 4 | 35 | 250 | 34 |
| 42 | 3.3 | 1.5 | 2.2 | 4.6 | 4 | 55 | 290 | 40 |
| 42 | 2 | 2.5 | 0.8 | 1.8 | 4 | 70 | 385 | 48 |
| 42 | 2.5 | 2.5 | 1 | 2.8 | 4 | 105 | 450 | 60 |
Առաջատար պտուտակի տեխնիկական բնութագրերը և կատարողականի պարամետրերը
| Տրամագիծ (մմ) | Առաջատար (մմ) | Քայլ (մմ) | Ինքնաամրապնդող ուժով անջատում (Հյուսիս) |
| 6.35 | 1.27 | 0.00635 | 150 |
| 6.35 | 3.175 | 0.015875 | 40 |
| 6.35 | 6.35 | 0.03175 | 15 |
| 6.35 | 12.7 | 0.0635 | 3 |
| 6.35 | 25.4 | 0.127 | 0 |
Նշում. Առաջատար պտուտակի ավելի մանրամասն տեխնիկական բնութագրերի համար խնդրում ենք կապվել մեզ հետ։
VSM42HSM ստանդարտ արտաքին շարժիչի ուրվագծային նկար՝
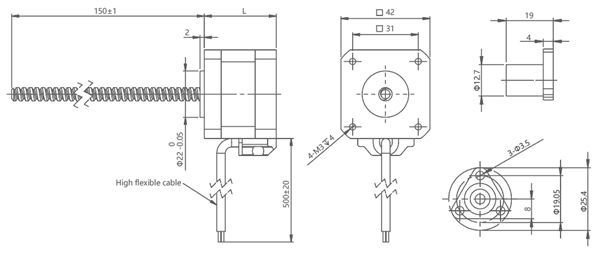
Նշումներ՝
Առաջատար պտուտակի երկարությունը կարող է հարմարեցվել
Անհատականացված մեքենայացումը կենսունակ է կապարի պտուտակի վերջում
42 մմ հիբրիդային քայլային շարժիչների ստանդարտ ամրացված շարժիչի ուրվագծային նկար
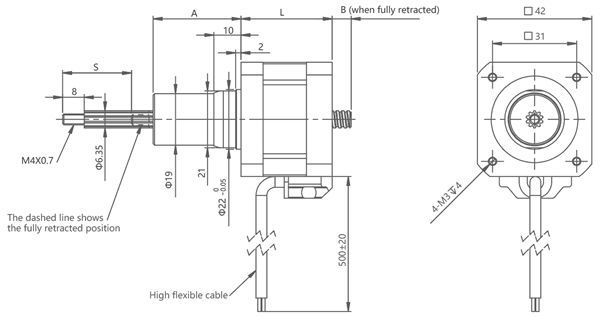
Նշումներ՝
Անհատականացված մեքենայացումը կենսունակ է կապարի պտուտակի վերջում
| Հարված S (մմ) | Չափս Ա (մմ) | Չափս B (մմ) | |||
| Լ = 34 | Լ = 40 | Լ = 48 | Լ = 60 | ||
| 12.7 | 20.6 | 6.4 | 0.4 | 0 | 0 |
| 19.1 | 27 | 12.8 | 6.8 | 0 | 0 |
| 25.4 | 33.3 | 19.1 | 13.1 | 5.1 | 0 |
| 31.8 | 39.7 | 25.5 | 19.5 | 11.5 | 0 |
| 38.1 | 46 | 31.8 | 25.8 | 17.8 | 5.8 |
| 50.8 | 58.7 | 44.5 | 38.5 | 30.5 | 18.5 |
| 63.5 | 71.4 | 57.2 | 51.2 | 43.2 | 31.2 |
42 մմ հիբրիդային քայլային շարժիչ՝ ստանդարտ ֆիքսված շարժիչի ուրվագծային նկար
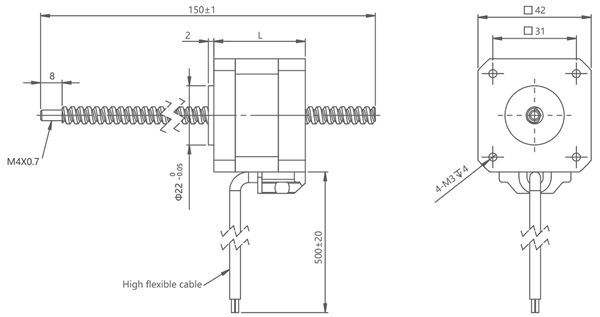
Նշումներ՝
Առաջատար պտուտակի երկարությունը կարող է հարմարեցվել
Անհատականացված մեքենայացումը կենսունակ է կապարի պտուտակի վերջում
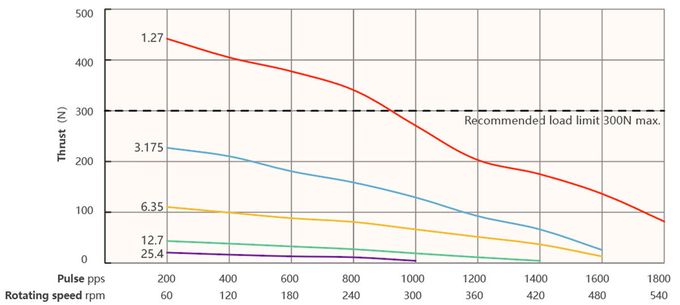
Արագության և հրման կորը.
42 շարքի 34 մմ շարժիչի երկարությամբ երկբևեռ չոփերային շարժիչ
100% հոսանքի իմպուլսի հաճախականություն և հրման կոր (Φ6.35 մմ կապարային պտուտակ)
42 շարքի 40 մմ երկարությամբ երկբևեռ շարժիչի չոփերային շարժիչ
100% հոսանքի իմպուլսի հաճախականություն և հրման կոր (Φ6.35 մմ կապարային պտուտակ)
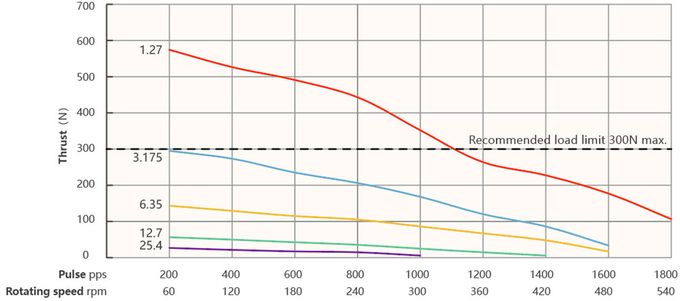
| Կապար (մմ) | Գծային արագություն (մմ/վ) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 3.175 | 3.175 | 6.35 | 9.525 | 12.7 | 15.875 | 19.05 | 22.225 | 25.4 | 28.575 |
| 6.35 | 6.35 | 12.7 | 19.05 | 25.4 | 31.75 | 38.1 | 44.45 | 50.8 | 57.15 |
| 12.7 | 12.7 | 25.4 | 38.1 | 50.8 | 63.5 | 76.2 | 88.9 | 101.6 | 114.3 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 177.8 | 203.2 | 228.6 |
Փորձարկման պայման՝
Չոպպերային շարժիչ, առանց թեքահարթակի, կիսա-միկրո-քայլային, շարժիչի լարում 40 Վ
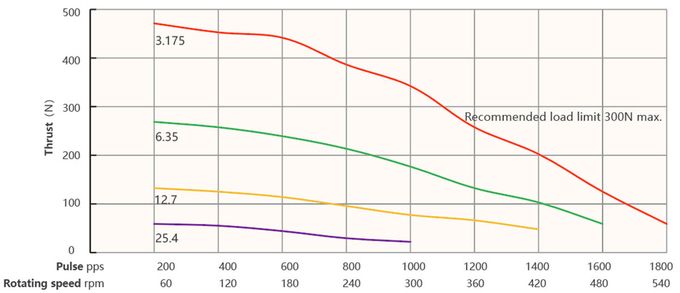
42 շարքի 48 մմ շարժիչի երկարությամբ երկբևեռ չոփերային շարժիչ
100% հոսանքի իմպուլսի հաճախականություն և հրման կոր (Φ6.35 մմ կապարային պտուտակ)
42 շարքի 60 մմ երկարությամբ երկբևեռ շարժիչի չոփերային շարժիչ
100% հոսանքի իմպուլսի հաճախականություն և հրման կոր (Φ6.35 մմ կապարային պտուտակ)
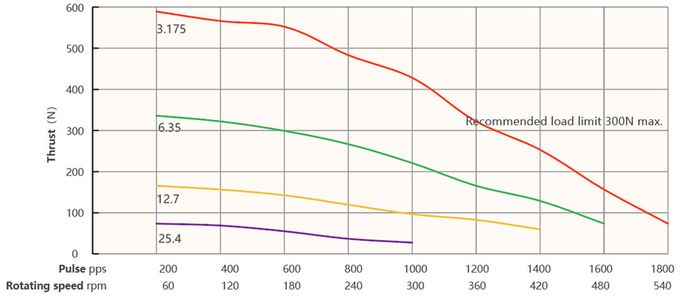
| Կապար (մմ) | Գծային արագություն (մմ/վ) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 3.175 | 3.175 | 6.35 | 9.525 | 12.7 | 15.875 | 19.05 | 22.225 | 25.4 | 28.575 |
| 6.35 | 6.35 | 12.7 | 19.05 | 25.4 | 31.75 | 38.1 | 44.45 | 50.8 | 57.15 |
| 12.7 | 12.7 | 25.4 | 38.1 | 50.8 | 63.5 | 76.2 | 88.9 | 101.6 | 114.3 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 177.8 | 203.2 | 228.6 |
Փորձարկման պայման՝
Չոպպերային շարժիչ, առանց թեքահարթակի, կիսա-միկրո-քայլային, շարժիչի լարում 40 Վ
Կիրառման ոլորտներ
Ավտոմատացման սարքավորումներ՝42 մմ հիբրիդային քայլային շարժիչները լայնորեն կիրառվում են ավտոմատացման տարբեր սարքավորումներում, այդ թվում՝ ավտոմատ փաթեթավորման մեքենաներում, ավտոմատացված արտադրական գծերում, հաստոցներում և տպագրական սարքավորումներում: Դրանք ապահովում են ճշգրիտ դիրքի կառավարում և բարձր պտտող մոմենտի ելք՝ բավարարելու ավտոմատացման սարքավորումների պահանջները՝ ճշգրիտ շարժման և հուսալիության համար:
3D տպիչներ՝42 մմ հիբրիդային քայլային շարժիչները կարևոր դեր են խաղում 3D տպիչներում: Դրանք օգտագործվում են տպիչի գլխիկը աշխատեցնելու համար՝ բարձր ճշգրտությամբ դիրքի կառավարման և ճշգրիտ տպագրական գործողություններ իրականացնելու համար: Այս շարժիչները ապահովում են լավ դիրքավորման ճշգրտություն և հուսալիություն, ինչը նպաստում է 3D տպիչների աշխատանքի և տպագրության որակի բարելավմանը:
Բժշկական սարքեր՝42 մմ հիբրիդային քայլային շարժիչները լայնորեն կիրառվում են բժշկական սարքերում: Օրինակ՝ բժշկական պատկերագրական սարքավորումներում (օրինակ՝ համակարգչային տոմոգրաֆիայի սկաներներ, ռենտգենյան սարքեր) այս շարժիչները օգտագործվում են պտտվող հարթակները և շարժվող մասերը կառավարելու համար: Բացի այդ, դրանք օգտագործվում են բժշկական սարքերում, ինչպիսիք են վիրաբուժական ռոբոտները, ներարկիչները և նմուշների ավտոմատացված մշակումը, ճշգրիտ դիրքի կառավարման համար:
Ռոբոտաշինություն։42 մմ հիբրիդային քայլային շարժիչները կարևոր դեր են խաղում ռոբոտաշինության մեջ։ Դրանք կարող են օգտագործվել ռոբոտի հոդերը շարժելու համար՝ ապահովելով բարձր ճշգրտությամբ դիրքի կառավարում և պտտող մոմենտի ելք։ Ռոբոտաշինության կիրառությունները ներառում են արդյունաբերական ռոբոտներ, սպասարկման ռոբոտներ և բժշկական ռոբոտներ։
Ավտոմոբիլային:42 մմ հիբրիդային քայլային շարժիչները կիրառություն ունեն ավտոմոբիլային սարքավորումներում: Դրանք օգտագործվում են ավտոմեքենաների ներսում տարբեր կառավարման համակարգերում, ինչպիսիք են ավտոմեքենայի նստատեղերի կարգավորումը, պատուհանների բարձրացումը և իջեցումը, ինչպես նաև հետևի տեսողության հայելիների կարգավորումը: Այս շարժիչները ապահովում են բարձր ճշգրտությամբ դիրքի կառավարում և հուսալի աշխատանք՝ ավտոմոբիլային սարքավորումների պատշաճ աշխատանքն ապահովելու համար:
Խելացի տուն և սպառողական էլեկտրոնիկա.42 մմ հիբրիդային քայլային շարժիչները օգտագործվում են խելացի տան և սպառողական էլեկտրոնիկայի մեջ: Դրանք կարող են օգտագործվել այնպիսի սարքերում, ինչպիսիք են խելացի դռան կողպեքները, տեսախցիկի գլխիկները, խելացի վարագույրները, ռոբոտացված փոշեկուլները և այլն՝ ճշգրիտ դիրքի կառավարման և շարժման գործառույթներ ապահովելու համար:
Բացի վերը նշված կիրառություններից, 42 մմ հիբրիդային քայլային շարժիչները կարող են օգտագործվել նաև տեքստիլ սարքավորումներում, անվտանգության մոնիթորինգի համակարգերում, բեմի լուսավորության կառավարման և այլ ոլորտներում, որոնք պահանջում են ճշգրիտ դիրքի կառավարում և հուսալի աշխատանք: Ընդհանուր առմամբ, 42 մմ հիբրիդային քայլային շարժիչները լայն կիրառություն ունեն բազմաթիվ ոլորտներում:
Առավելություն
Մոմենտը ցածր արագություններում.42 մմ հիբրիդային քայլային շարժիչները ցուցաբերում են գերազանց պտտող մոմենտի կատարողականություն ցածր արագությունների դեպքում: Դրանք կարող են ստեղծել բարձր պահպանման պտտող մոմենտ, ինչը թույլ է տալիս նրանց սահուն մեկնարկել և աշխատել նույնիսկ շատ ցածր արագությունների դեպքում: Այս բնութագիրը դրանք հարմար է դարձնում ճշգրիտ կառավարում և դանդաղ շարժումներ պահանջող կիրառությունների համար, ինչպիսիք են ռոբոտաշինությունը, ավտոմատացման սարքավորումները և բժշկական սարքերը:
Դիրքորոշման ճշգրտությունը՝Այս շարժիչները ապահովում են բարձր դիրքորոշման ճշգրտություն: Իրենց նուրբ քայլերի լուծաչափի շնորհիվ դրանք կարող են հասնել ճշգրիտ դիրքորոշման և շարժման ճշգրիտ կառավարման: Սա կարևոր է այնպիսի կիրառություններում, որոնք պահանջում են ճշգրիտ դիրքորոշում, ինչպիսիք են CNC մեքենաները, 3D տպիչները և վերցնել-տեղադրելու համակարգերը:
Ինքնակողպման հնարավորություն՝Հիբրիդային քայլային շարժիչները ունեն ինքնակողպման հնարավորություն, երբ փաթույթներին էներգիա չի մատակարարվում։ Սա նշանակում է, որ դրանք կարող են պահպանել իրենց դիրքը առանց էլեկտրաէներգիա սպառելու, ինչը առավելություն է այն դեպքերում, երբ անհրաժեշտ է դիրքը պահել առանց էլեկտրաէներգիայի, օրինակ՝ ռոբոտացված ձեռքերում կամ դիրքորոշիչներում։
Արդյունավետ ծախսարդյունավետ:42 մմ հիբրիդային քայլային շարժիչները ապահովում են մատչելի լուծում բազմաթիվ կիրառությունների համար: Համեմատած այլ տեսակի շարժիչների, ինչպիսիք են սերվոշարժիչները, համեմատած դրանք, ընդհանուր առմամբ, ավելի մատչելի են: Բացի այդ, դրանց կառավարման համակարգի պարզությունը և հետադարձ կապի սենսորների բացակայությունը նպաստում են դրանց մատչելիությանը:
Գործողության արագությունների լայն տեսականի՝Այս շարժիչները կարող են աշխատել լայն արագությունների միջակայքում՝ շատ ցածր արագություններից մինչև համեմատաբար բարձր արագություններ: Դրանք ապահովում են արագության լավ կառավարում և կարող են ապահովել սահուն արագացում և դանդաղեցում: Արագության կառավարման այս ճկունությունը դրանք հարմար է դարձնում տարբեր արագության պահանջներ ունեցող կիրառությունների համար:
Կոմպակտ չափս՝42 մմ ձևի գործակիցը ներկայացնում է համեմատաբար կոմպակտ չափս քայլային շարժիչի համար։ Սա հեշտացնում է դրա ինտեգրումը սահմանափակ տարածության մեջ կիրառվող ծրագրերում կամ սարքավորումների մեջ, որոնք պահանջում են կոմպակտ և թեթև կառուցվածք։
Հուսալիություն և երկարակեցություն.Հիբրիդային քայլային շարժիչները հայտնի են իրենց հուսալիությամբ և դիմացկունությամբ։ Դրանք նախագծված են երկար ժամանակահատվածներում անընդհատ աշխատելու համար՝ նվազագույն սպասարկման պահանջներով։
Շարժիչի ընտրության պահանջները.
► Շարժման/տեղադրման ուղղություն
► Բեռնման պահանջներ
►Կաթվածի պահանջներ
► Վերջնական մեքենայացման պահանջներ
►Ճշգրտության պահանջներ
►Կոդավորիչի հետադարձ կապի պահանջներ
► Ձեռքով կարգավորման պահանջներ
► Շրջակա միջավայրի պահանջներ
Արտադրական արհեստանոց


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)