.jpg)
.jpg)
.jpg)
.jpg)
Nema 14 (35 մմ) հիբրիդային քայլային շարժիչ, երկբևեռ, 4-հաղորդիչ, ACME հաղորդիչ պտուտակով, 1.8° քայլի անկյուն, բարձր արդյունավետություն։
Nema 14 (35 մմ) հիբրիդային քայլային շարժիչ, երկբևեռ, 4-հաղորդիչ, ACME հաղորդիչ պտուտակով, 1.8° քայլի անկյուն, բարձր արդյունավետություն։
Այս 35 մմ հիբրիդային քայլային շարժիչը հասանելի է երեք տեսակի՝ արտաքին շարժիչով, միջանցիկ առանցքով և միջանցիկ ֆիքսված առանցքով։ Դուք կարող եք ընտրել ձեր կոնկրետ կարիքներին համապատասխան։
VSM35HSM ստանդարտ արտաքին շարժիչի ուրվագծային նկար
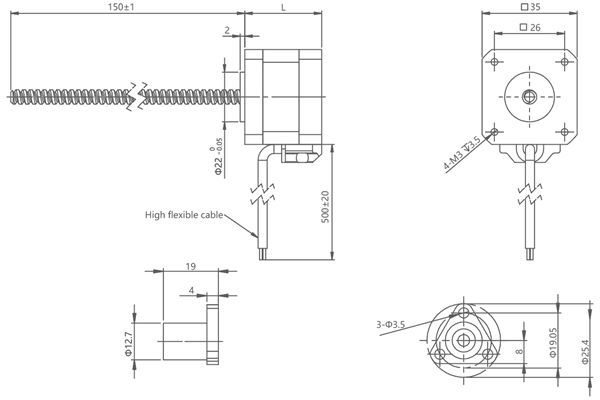
Նշումներ՝
Առաջատար պտուտակի երկարությունը կարող է հարմարեցվել
Անհատականացված մեքենայացումը կենսունակ է կապարի պտուտակի վերջում
Նկարագրություններ
| Արտադրանքի անվանումը | 35 մմ հիբրիդային քայլային շարժիչներ |
| Մոդել | VSM35HSM |
| Տեսակ | հիբրիդային քայլային շարժիչներ |
| Քայլի անկյուն | 1.8° |
| Լարում (Վ) | 1.4/ 2.9 |
| Հոսանք (Ա) | 1.5 |
| Դիմադրություն (Օհմ) | 0.95 / 1.9 |
| Ինդուկտիվություն (մՀ) | 1.5 /2.3 |
| Առաջատար լարեր | 4 |
| Շարժիչի երկարությունը (մմ) | 35/45 |
| Շրջակա միջավայրի ջերմաստիճանը | -20℃ ~ +50℃ |
| Ջերմաստիճանի բարձրացում | Առավելագույնը՝ 80 հազար |
| Դիէլեկտրիկ ամրություն | 1մԱ առավելագույնը @ 500Վ, 1ԿՀց, 1վրկ։ |
| Մեկուսացման դիմադրություն | 100 ՄΩ Նվազագույնը @500 Վ հաստատուն հոսանք |
Հավաստագրեր

Էլեկտրական պարամետրեր՝
| Շարժիչի չափը | Լարում /Փուլ (Վ) | Ընթացիկ /Փուլ (Ա) | Դիմադրություն /Փուլ (Ω) | Ինդուկտիվություն /Փուլ (մՀ) | Քանակը Առաջատար լարեր | Ռոտորի իներցիա (գ.սմ2) | Շարժիչի քաշը (գ) | Շարժիչի երկարությունը՝ Լ (մմ) |
| 35 | 1.4 | 1.5 | 0.95 | 1.4 | 4 | 20 | 190 | 34 |
| 35 | 2.9 | 1.5 | 1.9 | 3.2 | 4 | 30 | 230 | 47 |
Առաջատար պտուտակի տեխնիկական բնութագրերը և կատարողականի պարամետրերը
| Տրամագիծ (մմ) | Առաջատար (մմ) | Քայլ (մմ) | Ինքնաամրապնդող ուժով անջատում (Հյուսիս) |
| 6.35 | 1.27 | 0.00635 | 150 |
| 6.35 | 3.175 | 0.015875 | 40 |
| 6.35 | 6.35 | 0.03175 | 15 |
| 6.35 | 12.7 | 0.0635 | 3 |
| 6.35 | 25.4 | 0.127 | 0 |
Նշում. Առաջատար պտուտակի ավելի մանրամասն տեխնիկական բնութագրերի համար խնդրում ենք կապվել մեզ հետ։
35 մմ հիբրիդային քայլային շարժիչների ստանդարտ ամրացված շարժիչի ուրվագծային նկար
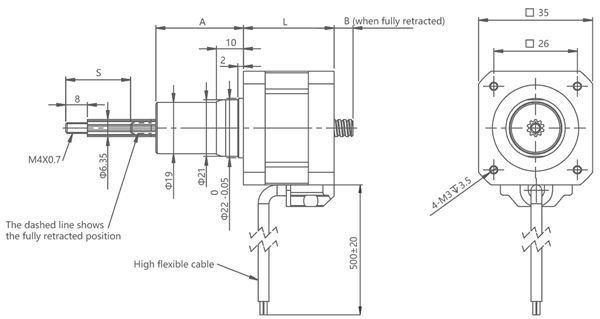
Նշումներ՝
Անհատականացված մեքենայացումը կենսունակ է կապարի պտուտակի վերջում
| Հարված S (մմ) | Չափս Ա (մմ) | Չափս B (մմ) | |
| Լ = 34 | Լ = 47 | ||
| 12.7 | 20.6 | 8.4 | 0 |
| 19.1 | 27 | 14.8 | 0.8 |
| 25.4 | 33.3 | 21.1 | 7.1 |
| 31.8 | 39.7 | 27.5 | 13.5 |
| 38.1 | 46 | 33.8 | 19.8 |
| 50.8 | 58.7 | 46.5 | 32.5 |
| 63.5 | 71.4 | 59.2 | 45.2 |
35 մմ հիբրիդային քայլային շարժիչի ստանդարտ ֆիքսված շարժիչի ուրվագծային նկար
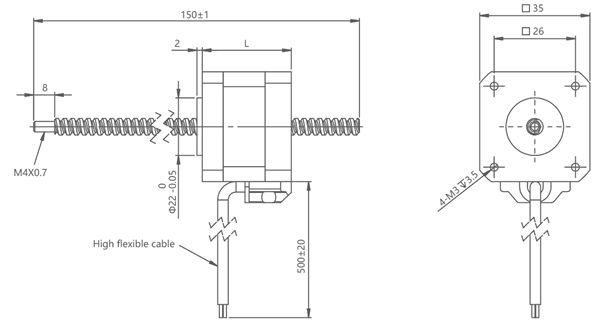
Նշումներ՝
Առաջատար պտուտակի երկարությունը կարող է հարմարեցվել
Անհատականացված մեքենայացումը կենսունակ է կապարի պտուտակի վերջում
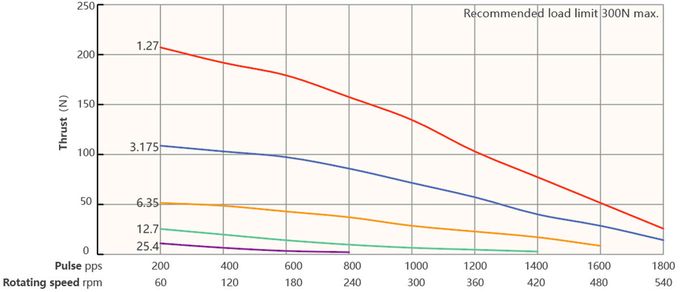
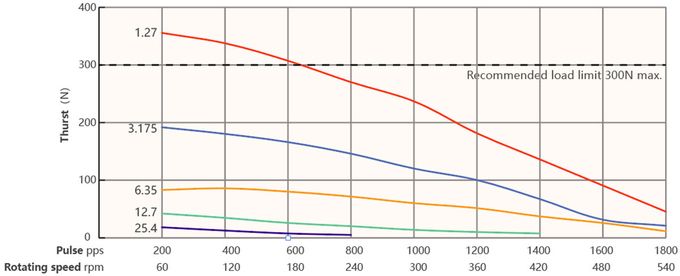
Արագության և հրման կորը.
35 շարքի 34 մմ շարժիչի երկարությամբ երկբևեռ չոփերային շարժիչ
100% հոսանքի իմպուլսի հաճախականություն և հրման կոր (Φ6.35 մմ կապարային պտուտակ)
35 շարքի 47 մմ երկբևեռ շարժիչի երկարությամբ չոփերային շարժիչ
100% հոսանքի իմպուլսի հաճախականություն և հրման կոր (Φ6.35 մմ կապարային պտուտակ)
| Կապար (մմ) | Գծային արագություն (մմ/վ) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 3.175 | 3.175 | 6.35 | 9.525 | 12.7 | 15.875 | 19.05 | 22.225 | 25.4 | 28.575 |
| 6.35 | 6.35 | 12.7 | 19.05 | 25.4 | 31.75 | 38.1 | 44.45 | 50.8 | 57.15 |
| 12.7 | 12.7 | 25.4 | 38.1 | 50.8 | 63.5 | 76.2 | 88.9 | 101.6 | 114.3 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 177.8 | 203.2 | 228.6 |
Փորձարկման պայման՝
Չոպպերային շարժիչ, առանց թեքահարթակի, կիսա-միկրո-քայլային, շարժիչի լարում 40 Վ
Կիրառման ոլորտներ
Արդյունաբերական ավտոմատացում.35 մմ հիբրիդային քայլային շարժիչները լայնորեն կիրառվում են արդյունաբերական ավտոմատացման կիրառություններում: Դրանք կիրառվում են տարբեր մեքենաներում և սարքավորումներում, ինչպիսիք են CNC մեքենաները, հավաքման և տեղադրման ռոբոտները, փոխադրիչ համակարգերը և ավտոմատացված հավաքման գծերը: Այս շարժիչները ապահովում են ճշգրիտ դիրքավորում, բարձր պտտող մոմենտ և հուսալի աշխատանք, ինչը դրանք դարձնում է հարմար պահանջկոտ արդյունաբերական միջավայրերի համար:
Ռոբոտաշինություն։Ռոբոտաշինությունը առաջատար ոլորտ է, որտեղ լայնորեն օգտագործվում են 35 մմ հիբրիդային քայլային շարժիչներ: Այս շարժիչները սովորաբար օգտագործվում են ռոբոտային ձեռքերի և մանիպուլյատորների միացումներում՝ ապահովելով ռոբոտի շարժումների ճշգրիտ վերահսկողություն: Դրանք ապահովում են գերազանց կրկնելիություն և դիրքորոշման ճշգրտություն, թույլ տալով ռոբոտներին կատարել բարդ առաջադրանքներ արդյունաբերական, բժշկական և հետազոտական պայմաններում:
Տեքստիլ մեքենաներ.Տեքստիլ արդյունաբերության մեջ 35 մմ հիբրիդային քայլային շարժիչները օգտագործվում են տարբեր տեքստիլ մեքենաներում, ինչպիսիք են՝ տրիկոտաժի, ասեղնագործության մեքենաները և գործվածք կտրող սարքավորումները: Այս շարժիչները ապահովում են ասեղների, գործվածքի մատակարարման մեխանիզմների և կտրող գործիքների շարժման ճշգրիտ կառավարում՝ ապահովելով ճշգրիտ և բարձրորակ տեքստիլ արտադրություն:
Փաթեթավորման մեքենաներ՝Փաթեթավորման մեքենաները պահանջում են ճշգրիտ և համաժամեցված շարժումներ՝ լցոնման, կնքման, պիտակավորման և փաթեթավորման նման առաջադրանքների համար: Այս մեքենաներում լայնորեն օգտագործվում են 35 մմ հիբրիդային քայլային շարժիչներ՝ ճշգրիտ դիրքավորում, բարձր պտտող մոմենտ և սահուն շարժման կառավարում ապահովելու իրենց ունակության շնորհիվ: Դրանք հնարավորություն են տալիս արդյունավետ և հուսալի փաթեթավորման գործողություններ իրականացնել այնպիսի ոլորտներում, ինչպիսիք են սննդամթերքի և խմիչքների, դեղագործության և սպառողական ապրանքների արտադրությունը:
Լաբորատորիայի ավտոմատացում.35 մմ հիբրիդային քայլային շարժիչները կիրառություն են գտնում լաբորատոր ավտոմատացման համակարգերում, ներառյալ հեղուկների մշակման ռոբոտները, նմուշների պատրաստման սարքավորումները և ախտորոշիչ գործիքները: Այս շարժիչները ապահովում են ճշգրիտ և կրկնվող դիրքավորում պիպետավորման, նմուշների մշակման և այլ լաբորատոր աշխատանքների համար՝ նպաստելով ավտոմատացմանը և բարելավելով արտադրողականությունը:
Սպառողական էլեկտրոնիկա.Այս չափի հիբրիդային քայլային շարժիչներ կարելի է գտնել նաև սպառողական էլեկտրոնային սարքերում: Դրանք օգտագործվում են այնպիսի սարքերում, ինչպիսիք են 3D տպիչները, տեսախցիկների գիմբալները, տնային ավտոմատացման համակարգերը և սպառողական ռոբոտաշինությունը: Այս շարժիչները հնարավորություն են տալիս ճշգրիտ կառավարել շարժումները և գործառույթները այս սարքերում՝ բարելավելով դրանց արդյունավետությունը և օգտագործողի փորձը:
Առավելություն
Բարձր ճշգրտություն։Այս շարժիչները ապահովում են բարձր ճշգրտությամբ դիրքի կառավարման հնարավորություն: Դրանք սովորաբար ունեն բարձր քայլի անկյան լուծաչափ, որը թույլ է տալիս կատարել փոքր քայլեր և ճշգրիտ դիրքային դիրքավորում: Սա դրանք դարձնում է հարմար ճշգրիտ շարժման կառավարում պահանջող կիրառությունների համար, ինչպիսիք են դիրքավորման համակարգերը, ճշգրիտ գործիքները և այլն:
Լավ ցածր արագության կատարում.35 մմ հիբրիդային քայլային շարժիչները լավ են աշխատում ցածր արագությունների դեպքում: Դրանք կարող են ապահովել բարձր պտտող մոմենտ, ինչը հեշտացնում է բարձր մեկնարկային մոմենտ պահանջող կամ ցածր արագությամբ աշխատող կիրառությունների հետ աշխատանքը: Սա դրանք հարմար է դարձնում ճշգրիտ կառավարում և դանդաղ շարժում պահանջող իրավիճակների համար, ինչպիսիք են բժշկական սարքավորումները, ճշգրիտ գործիքները և այլն:
Պարզ վարման կառավարում.Այս շարժիչներն ունեն համեմատաբար պարզ կառավարման մեխանիզմ։ Դրանք սովորաբար կառավարվում են բաց օղակի կառավարման միջոցով, ինչը նվազեցնում է համակարգի բարդությունը և արժեքը։ Ճիշտ կառավարման սխեմաները կարող են ապահովել քայլային շարժիչների ճշգրիտ դիրքի և արագության կառավարում։
Հուսալիություն և երկարակեցություն.35 մմ հիբրիդային քայլային շարժիչները ապահովում են բարձր հուսալիություն և դիմացկունություն: Դրանք սովորաբար արտադրվում են բարձրորակ մագնիսական դիզայնով և նյութերով, որոնք պահպանում են կայուն աշխատանքը երկար ժամանակահատվածներում շահագործման և հաճախակի մեկնարկների ու կանգառների ընթացքում: Սա դրանք հարմար է դարձնում այն կիրառությունների համար, որոնք պահանջում են երկար աշխատանքային ժամանակ և բարձր հուսալիություն:
Արագ արձագանք և դինամիկ կատարողականություն.Այս շարժիչներն ունեն արագ արձագանքման ժամանակ և լավ դինամիկ կատարողականություն։ Դրանք կարող են կարճ ժամանակահատվածում հասնել ճշգրիտ դիրքի փոփոխությունների և կարող են արագ արագանալ ու կանգ առնել։ Սա դրանք հարմար է դարձնում այն կիրառությունների համար, որոնք պահանջում են արագ արձագանք և բարձր դինամիկ կատարողականություն, ինչպիսիք են ռոբոտաշինությունը, ավտոմատացման սարքավորումները և այլն։
Կիրառման լայն ոլորտներ.35 մմ հիբրիդային քայլային շարժիչները կիրառվում են լայն շրջանակի ոլորտներում և կիրառություններում: Դրանք հարմար են արդյունաբերական ավտոմատացման, ռոբոտաշինության, բժշկական սարքավորումների, տեքստիլ սարքավորումների, փաթեթավորման մեքենաների, լաբորատոր ավտոմատացման և շատ այլ ոլորտներում: Այս շարժիչների առավելությունները դրանք իդեալական են դարձնում բազմաթիվ կիրառման սցենարների համար:
Շարժիչի ընտրության պահանջները.
► Շարժման/տեղադրման ուղղություն
► Բեռնման պահանջներ
►Կաթվածի պահանջներ
► Վերջնական մեքենայացման պահանջներ
►Ճշգրտության պահանջներ
►Կոդավորիչի հետադարձ կապի պահանջներ
► Ձեռքով կարգավորման պահանջներ
► Շրջակա միջավայրի պահանջներ
Արտադրական արհեստանոց



-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)